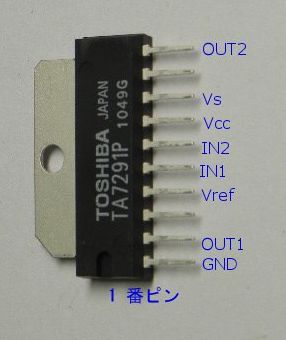
- GNDはその回路の全ての基準電圧であるゼロボルトを示すところにつなげます。
- ここではVsとVccは同じ電圧であるとして作ります。Vsはモーターの電源、VccはこのICの電源です。
- Vrefは参照電圧で、これによって出力電圧を変えることができますが、ここでは10kΩ程度の抵抗でVccにつなぎます。
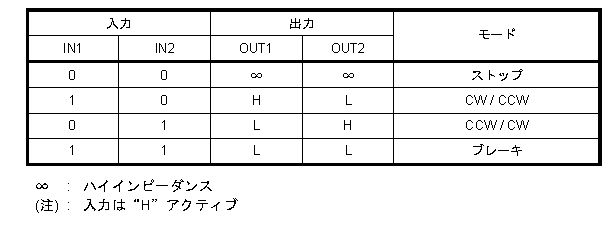
- IN1とIN2はマイクロコントローラ(CPU)からの入力制御信号です。
- OUT1とOUT2は直流モーターにつなぎます。
- これ一つで、一つのモーターを担当しますから、2つのモーターを駆動するには同じ回路がもう一つ必要になります。
- 電源は、電池を直接つなぐと、電圧低下をおこした時にモーターのスピードが正しくコントロールされなくなるので、5Vの定電圧回路を間に入れます。従って、入力電圧は6V程度の電池をつなぎます。