| 動かすための準備・・・ |
◎動作スペック
OS :Microsoft Windows 2000 or XP
CPU :Pentium3 以上
メモリー :128MB 以上
通信ポート:RS-232C(USB 変換を使う場合、動作の保障はされません)
◎インストール
プチロボ専用サイト(http://keic.jp/puchirobo/)からダウンロードしたソフトをダブルクリックするとインストーラーが起動するので、インストール場所(初期設定:C:\Program Files\Puchi_Robo)を指定し、インストールを完了して下さい。
◎プチロボソフトの使い方
まず最初にインストールしたフォルダを開き、「Puchirobo.exe」を起動します。
通信ポートの設定画面が出てくるので使用するポート番号を選択します。(初期設定はCOM1)
◎大まかな手順
ここでの説明はロボットが完成しているものと仮定しています。細かな動作作成については「動作」で説明しますので、練習程度にソフトを操作をしながらサーボモーターなどに不良品が無いか確認しましょう。
→メインウィンドウの中央部にロボットの画像を貼り付ける
→何もしていないときのモーターの初期位置「ホームポジション」を設定する
→各モーターを動かしながら動作を確認する
→動作が決まったらコマ送りの要領で1つの動作ごとに「キャプチャー」する
→ある程度完成したら「モーション開始」で動作を確認しながら訂正と作成をする
→「保存」で動作データを保存する
といった感じです。
◎ソフトウェア起動画面
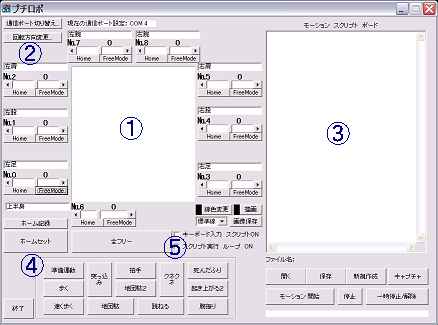
①フォーム中央写真部
ドラック&ドロップで任意の画像(BMP,JPG,GIF)を貼り付けできます。
「描画」ボタンを押すと写真内に線が書け、「線色変更」ボタンで線の色を帰ることができ、"モーターNo."と結ぶと見やすくなります。
線が引き終わったら「画像保存」ボタンで保存します。新規ファイル"BackPictyre.BMP"で保存されるのでオリジナルの画像は残ります。
各サーボモータNo.0~8に名称を設定できます。
②回転方向変更(フォーム左上ボタン)
モーターの画面表示数字に対する回転方向を変更します。
(数値が+のときに右回転か左回転するか)
足など左右対称のものを作った場合、数字を統一すると左右逆になります。
③モーション スクリプト ボード
新規で入力する場合はまず「新規作成」ボタンを押して下さい。「新規」と書いてある部分にモーション名(ファイル名)を必ず入力してください。(エラーになると強制終了されてしまうので、データを入力をする前にファイルを作ることをお勧めします)その下にモーションデータを入力していきます。
基本的に「モーターを動かす→キャプチャーボタンを押す」の繰り返しで動作を作成できます。
「モーション開始」ボタンで動作を確認できます。
④コマンドボタン部
ドラッグ&ドロップで任意の".msf"ファイルが設定できます。
コマンドボタンにファイル名が表示されます。(長い名前は切れてしまうので、短く簡単なものをお勧めします)
⑤スクリプト実行ループ
チェックを付けるとスクリプトボードに表示中の動作を繰り返し実行します。
停止するときはチェックをはずすかコマンドの停止を押して下さい。
歩行など繰り返し同じ動作をするときに使用すると便利です。
詳しい動作の作り方は「動作」で説明します。
サーボモーターなどに不良品が無いことを確認したら次に本体作成に入ります。
|
|
|
|
|
|
|