| 動作作成 |
◎PCに接続・・・
本体が完成したら「ソフト」を参考にPCと接続し、各モーターがちゃんと動くか確認しましょう。
モーターが全部動いたら今度は各モーターのホームポジションを決めます。早く言えば何もしてない状態の位置です。これは本体を作るときに調整していると思うのでそのままの状態でいいと思います。
◎キャプチャー
動作を作る方法で一番簡単なのは実際に動かしながらほしいデーターだけキャプチャーで拾っていく方法です。
1.まず新規作成でファイル名指定した後、エラー回避のため空の状態で保存をしておきます。
2.各モーターNO.の下のバーを動かしながらロボットの動きを決めていきます。
3.ちょうどいいところが見つかったらキャプチャーボタンを押してデーターを拾います。
あとは2と3を繰り返していくだけです。
◎慣れてきたら・・・
キャプチャーをしているとモーションスクリプトボードに書いてあることがわかるようになると思います。
要するにモーターNo.とそれをどこまで動かすかということが書いてあるだけなのです。これを直接書き換えても動作を作ることが出来ます。
また、直接入力するときにいくつかのコマンドが使えるので表記しておきます。
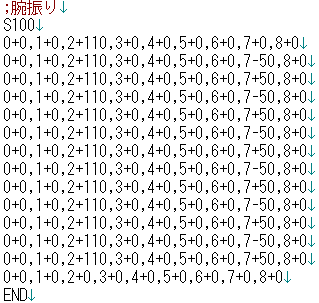
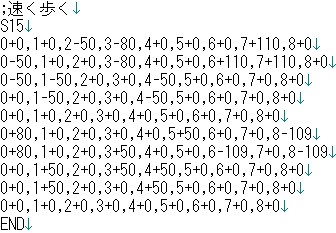
";"
1文字目が";"の場合はプログラムに影響なくメモとして自由に記述する事が出来ます。また、1行目に記述した場合、そのコメントがファイル名として保存されます。
例 ;コメント
"S"
1文字目が"S"の場合はその後に続く数字によってスピードを変えられます。その数値は1~100%の範囲で変えられます。
例 S10
"W"
1文字目が"W"の場合はその後に続く数字によって待ち時間を設定できます。タイマーの単位はmsですが100ms以下の微少時間の設定はあまり差が出ないのであまりお勧めしません。
例 W100
また、"S"と"W"は","で区切れば同じ行に記述することができます。
例 S50,W500
"END"
モーションスクリプトの記述の終わりの宣言です。"END"を検出すると停止します。
◎動作作成例
「本体」で作ったロボットに動作をつけるとこんな感じになります。

以上でプチロボの説明を終わります。
|
|
|
|
|
|
|