| 本体作成 |
◎どんなことをさせたいか?
最初に目的を決めます。歩かせたり、戦わせたり、何かをつかませたり・・・ただ、小型のサーボモーターなのであまりにも大きな負荷がかかることはやめましょう。
◎どんな形にするか?
次に目的にあった形を考えていきます。歩かせる場合は二脚や多脚、つかませる場合は腕のみなど・・・注意したいことはサーボモーター9個で可能な動きを考えなければならないことです。
◎材料の調達
「プチロボ」には基本的にサーボモーターしか付いていませんので、サーボモーター以外のパーツは自分で調達することになります。ここまでで決めた目的や形から必要なものの検討をつけていきましょう。特に100円均一は値段も安く大体のものが揃うのでお勧めです。
◎組み立て時の注意点
材料が揃ったら組み立てるのですが、いくつか注意すべきことがあります。
☆サーボモーターの稼動域
普通のモーターと違いこのモーターは約180度程度の範囲でしか動きません。なので、組み立てるときモーター部分の接着は一番最後にし、接着するときは一度ソフトウェアでホームポジションの確認をしながらやると問題なく出来ると思います。

☆サーボモーターのグリス
しばらく時間が経つと下図の部分からグリスが出てくる場合があります。なので、この部分を接着する場合は両面テープなどではなく、瞬間接着剤など強力なものや油に強いものでないとはがれてしまいます。

☆コントロールボードの搭載
どんな形にしてもサーボモーターのコードが短いためコントロールボードを載せなくてはいけません。これを解消するために下図のようなターミナルボードを作ることをお勧めします。詳しくは公式サイトに載っているので見てみてください。

以上のことに注意すれば理想のロボットを作ることが出来ると思います。本体が完成したら「動作」で実際に動作を作って動かしてみましょう。
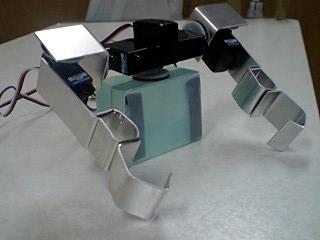
◎作成例
今回は二足歩行型のロボットを作ります。材料は元々付いているアルミ板と両面テープに、100円均一で買って来たプラスティック板と瞬間接着剤です。
(1)上半身
3つのサーボモーターを下の画像のように瞬間接着剤で接着します。これが顔と肩の部分になります。

(2)胴体
100円均一で買って来たプラスティック板を切って縦2.5cm×横5cm×高さ4cmの箱を作ります。

(3)脚部
2つのサーボモーターを瞬間接着剤で接着したものを2つ作ります。

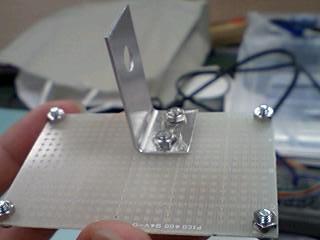
(4)足底
アルミ板を端から1.5cmのところで90度に折り曲げる。ドリルでアルミ板とプラスティック板に穴を開け、ネジで固定したものを左右対称にもう一組作ります。
(5)腕部
下の画像のようにアルミ板とサーボモーターを両面テープで接着したものを左右対称にもう一組作ります。
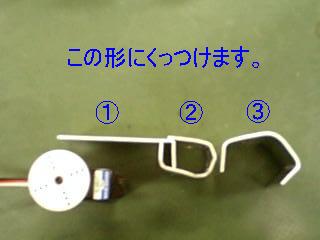
①アルミ板の端から1cmの部分で90度に折り曲げたものです。
②アルミ板の端から1cm、1.5cm、1cmの各部分で90度に折り曲げて輪っか状にしたものです。
③アルミ板の端から1cmのところを60度、1.5cmのところを30度、1.5cmのところを90どで折り曲げたものです。
(6)接続部
プラスティック板から縦2cm×横7cmのものを2枚切り取り、そのうち1枚に両端から1cmのところに直径7mmの穴を開けます。
アルミ板の端から2.5cmのところで90度に折り曲げたものを2つ作ります。

全部のパーツを並べるとこうなります。

ここからは全部のサーボモーターをコントロールボードに接続し、ソフトからホームポイントを設定しながら接着していきます。
今回は全部のサーボモーターのホームポイントを左右同じ範囲で動くように真ん中に設定しています。もし、最初の位置から一方向にしか動くことが無い場合などはホームポイントの設定をずらしておくと使える範囲が広くなります。
サーボモーターと接続したコネクタの番号は固定するのでモーターの位置と番号を合わせるとわかりやすくなります。(例:足なら下のほうにあるM0やM3など)
(7)脚部の組み立て
丸いサーボホーンに穴の開いた両面テープを貼り付け、反対側の紙もはがしておきます。(6)で作ったプラスティック板の穴に先ほどのサーボホーンをくっつかないように(3)で接着したサーボモーターと挟み、前を向く位置で貼り付けます。反対側も同じように貼り付けます。
サーボモーターとサーボホーンをネジ止めしてからもう1枚のプラスティック板で挟みます。
次に先ほどの要領で(4)で作った足底とサーボホーン、サーボモーターを真っ直ぐ立つように貼り付けます。

(8)上半身の組み立て
(1)で接着したサーボモーターと(2)で作った胴体を穴の開いた両面テープで貼り付けます。
(5)で作成した腕部と(6)で作ったアルミ板を貼り付け、先ほど作成した胴体に貼り付けます。
(9)合体
(7)の脚部と(8)の上半身をくっつけて配線すれば完成です。

|
|
|
|
|
|
|