例えば、乾電池を一個つなげれば、回転します。二個直列につなげれば高速回転します。三個直列につなげると、さらに高速回転しますが、変な臭いがし始めて壊れるかもしれません。
サーボモーターで使っているモーターは右図のような大きさの直流モーターではなく、小型にしてギアでスピードを落として使っています。

例えば半分のスピードにするために半分の電圧にすることを考えます。
電圧を下げるために抵抗を直列につなぐと考える人もいるでしょう。使用条件に依存しますが、0.5A流れるとして半分の電圧がモーターにかかるとすると、
2R = 1.5(V)/0.5(A) = 3、 従ってR=1.5Ω、抵抗で消費される電力 P=IV = 0.5*0.75=0.375、従って1.5Ωで1/2Wの抵抗が必要になります。
1/4のスピードにするには4R=3になり、R=0.75Ωとなります。
では、連続的にスピードを変えるにはどうするかというと、消費電力が大きく、抵抗値の小さい可変抵抗が必要になります。そんなの売っていません。さらにこれをコンピュータでコントロールするには? と考えるとだんだんと複雑になって頭が痛くなってきます。従って、ここでこの考え方の延長はやめます。
モーターを乾電池1個で動かす場合を考えます。
- 10秒間だけモーターに電流を流します。それなりに回ります。
- 次に5秒間だけモーターに電流を流し、後の5秒は流しません。それなりに回り、止まります。
- 1秒電流を流し、1秒電流を止めるを繰り返し、10秒間続ける。回ったり止まったりする。
- 1/10秒電流を流し、1/10秒電流を止めるを繰り返し、10秒間続ける。動いたり止まったりする暇が無いので、以前より遅く回る。
- 30/100秒電流を流し、70/100秒電流を止めるを、繰り返すとさらに遅く回る。
- 10/100秒電流を流し、90/100秒電流を止めるを、繰り返すとさらに遅く回る。
- 0秒電流を流し、1秒電流を止めるを繰り返すとモーターは止まる。
実際には、逆回転ができないと意味が無いので、Hブリッジ回路を用いて逆回転も出来るようにしています。
 |
左の図のようにH型になっているのでHブリッジと言います。真ん中のMがモーターです。モーターに左側から右側方向に電流を流すには①と④のスイッチをONにして、②と③のスイッチをOFFにします。また。逆に電流を流して逆回転させるには、①と④のスイッチをOFFにして、②と③のスイッチをONにします。全部のスイッチをOFFにすると止まりますが、惰性ですぐには止まりません。②と④のスイッチをONにして、①と③のスイッチをOFFにすると、モーターにたまっているエネルギーが短絡されて高速に止まります。これらのスイッチを手でON/OFFするのではなく、電気信号で制御するためのIC(Integrated Circuit: 集積回路)があります。例えば下図のようなTA7291Pという製品があります。 単純にモーターを正逆転させるにはこれたけで制御できます。もちろん、スイッチの開閉のタイミングをパルス幅変調(PWM)する必要があります。それには下の写真のIN1とIN2で行います。 |
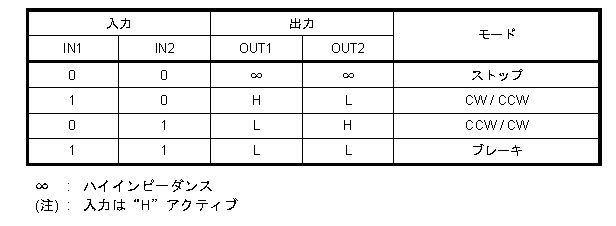 CWはClockWise(時計回り) CCWはCounter ClockWise(反時計回り) |
|
 |
サーボモーターは回転させるのが目的ではなく、ある角度で停止することが目的に作られています。
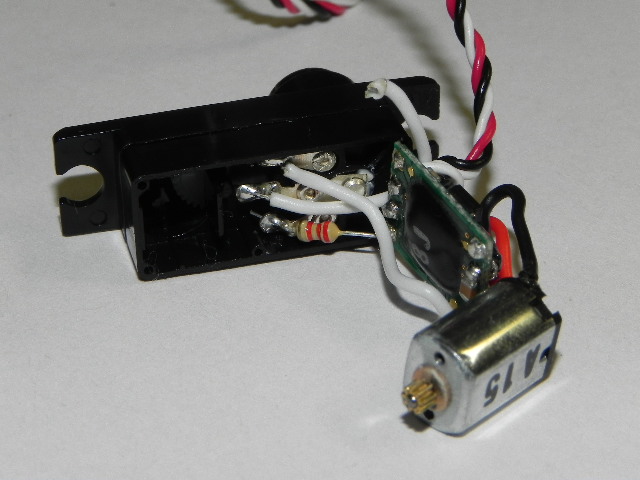
実際には、この集積回路単体がサーボモーターの中に入っているのではなく、コンピュータから送られてくるパルス幅によって、左右に動きます。あるパルス幅で停止します。右に動くか左に動くかは、現在、どの位置にいるかによって異なります。この位置検出のためにポテンショメータが入っています。サーボモーターの出力軸に直結されていて、回転とともに抵抗が変わる可変抵抗器です。この可変抵抗器の両端にはグラウンドと電源がつながっているので、出力としては電圧が位置情報になります。この電圧を超小型コンピュータのようなもので処理し、Hブリッジと同じような機構でモーターをパルス幅を指定の位置に移動させます。この移動を効率よく行わせるために簡単なPID制御が使われている場合があります。 サーボモーターの可動範囲は大体180度になっています。回転はできません。 回転できるように(サーボ機能を殺す)改造したときの写真が下記にあります。 |
|
サーボモーターを解体したところ。モーター、制御基板が見える。可変抵抗器への接続は白い線と抵抗の部分。制御基板には組み込み用CPUが使われている。 |

|
ギアを全部取り払ったところ 写真下部に蝶々型に銀色に光っている部分の向こう側に可変抵抗器が隠れている。 |