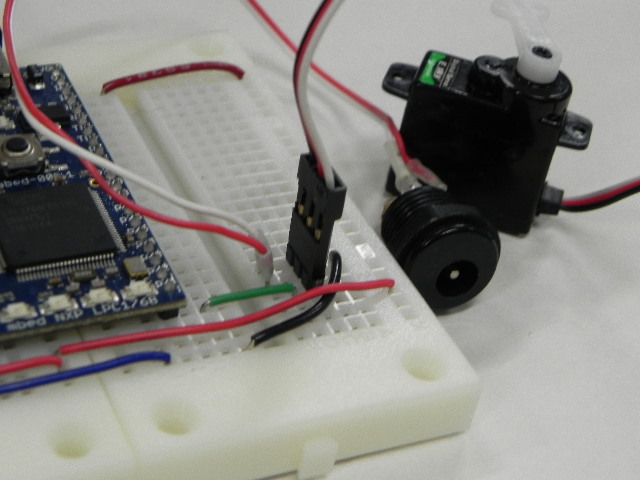
| サーボモーターを動かす | |
|---|---|
#include "mbed.h"
PwmOut pwm(p21);
int main() {
int start=500, end=2200;
while(1){
for(int p = start; p < end; p += 20) {
pwm.pulsewidth_us(p);
wait_ms(40);
}
for(int p = end; p >=start; p -= 20) {
pwm.pulsewidth_us(p);
wait_ms(40);
}
}
}
|
1 mbed用のヘッダ 2 3 パルス幅変調の出力はp21を用いる 4 5 6 pwmのhighの部分の時間を500μ秒から 7 2200μ秒までスキャンさせる 8 左回り 9 パルス幅を設定する 10 40ミリ秒待つ 11 12 右回り 13 パルス幅を設定する 14 40ミリ秒待つ 15 16 17 |