








ビニールテープなどで周りを固定します。これで完成です。
| サーボモーターは通常パルス幅である角度で止まるようになっています。ですから、可動範囲は約180度ぐらいになっています。これを角度ではなく、回転スピードになるように改造してみます。ここでは、小型の安いサーボモータを使ってみます。 |
| ラベルがテープで巻かれているので、これを剥がします。 |
| ギア側を外します。 |
| 一番上のギアを取り外します。 |
| 二つのポッチをニッパーなどで切り落とします。 |
| 切り落とした後。 |
| ギアを全部外します。赤印の所にポッチが2つあります。これをカッターなどで取り除きます。スムースにグルグル回るように削り取ります。 |
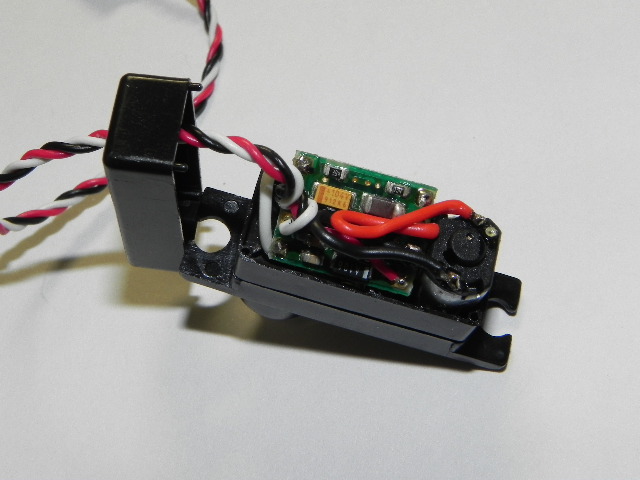
| 後ろ側の蓋を開けます。 |
| ギヤ側につながっている二本の白い線を取り外します。また、2.2kΩの抵抗もギア側の方を取り外します。 |
| 1kΩの抵抗を写真のように2.2kΩの抵抗とつなげます。他の部分と接触しないように絶縁します。 |
| ギアを元に組み立て、裏の回路も収納して元と同じにします。 ビニールテープなどで周りを固定します。これで完成です。 |
| main.cpp | |
|---|---|
#include "mbed.h"
#include "BoeBot.h"
PwmOut Left((PinName)P14);
int main()
{
Left.period_ms(20);
while(true){
Left.pulsewidth_us(1700);
wait(2.0);
Left.pulsewidth_us(1300);
wait(2.0);
}
}
|
1 2 3 4 BoeBotの3つめのサーボとしてテストする。 5 6 7 8 9 10 11 12 13 14 15 |