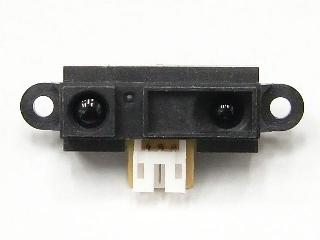
右側の長細いセンサーがPSDで、左側の小さいのが赤外線の発光ダイオードになっています。
|
|
|
|
|
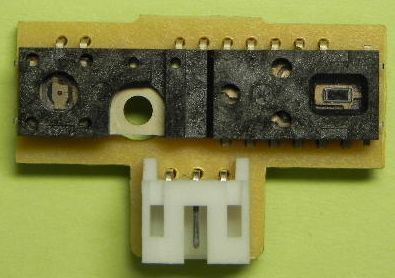
右側の長細いセンサーがPSDで、左側の小さいのが赤外線の発光ダイオードになっています。 |
| IrDistance.h | |
|---|---|
#ifndef _IRDISTANCE
#define _IRDISTANCE
#include <mbed.h>
#include "AnalogIn.h"
class IrDistance
{
private:
AnalogIn *left, *right;
public:
IrDistance();
IrDistance(PinName left, PinName right);
float getLeft();
float getRight();
};
#endif
|
1 ヘッダーの再定義禁止用 2 3 mbed用ヘッダー 4 アナログ入力用へっだー 5 6 7 8 9 左右のアナログオブジェクトへの参照 10 11 12 コンストラクタ 13 引数付きコンストラクタ 14 左の距離を得る 15 右の距離を得る 16 17 18 1行目に対応する |
| IrDistance.cpp | |
|---|---|
#include "IrDistance.h"
IrDistance::IrDistance()
{
left = new AnalogIn(p19);
right = new AnalogIn(p20);
}
IrDistance::IrDistance(PinName L, PinName R)
{
left = new AnalogIn(L);
right = new AnalogIn(R);
}
float IrDistance::getLeft()
{
return *left;
}
float IrDistance::getRight()
{
return *right;
}
|
1 赤外線距離センサー用のヘッダー 2 3 コンストラクタ 4 左のセンサーはp19につなげる 5 右のセンサーはp20につなげる 6 7 8 9 ピンを指定してのコンストラクタ 10 11 12 13 14 左の距離データを求める 15 16 17 18 19 右の距離データを求める 20 21 22 |
| main.cpp | |
|---|---|
#include "mbed.h"
#include "IrDistance.h"
#include "I2CLCD.h"
IrDistance distance(p19,p20);
I2CLCD lcd;
int main() {
lcd.clear();
while(true) {
lcd.write((int)(distance.getLeft()*1000),6,0);
lcd.write((int)(distance.getRight()*1000),6,0);
wait(0.3);
lcd.clear();
}
}
|
1 mbed用ヘッダー 2 赤外線距離センサー用のヘッダー 3 I2CLCDディスプレー用ヘッダー 4 左のセンサーをp19、右のセンサーをp20に繋げる 5 I2CLCDディスプレーのオブジェクト 6 7 8 LCDをクリアする 9 10 左側の距離データをLCDに表示する 11 右側の距離データをLCDに表示する 12 300ミリ秒待つ 13 LCDをクリアする 14 |