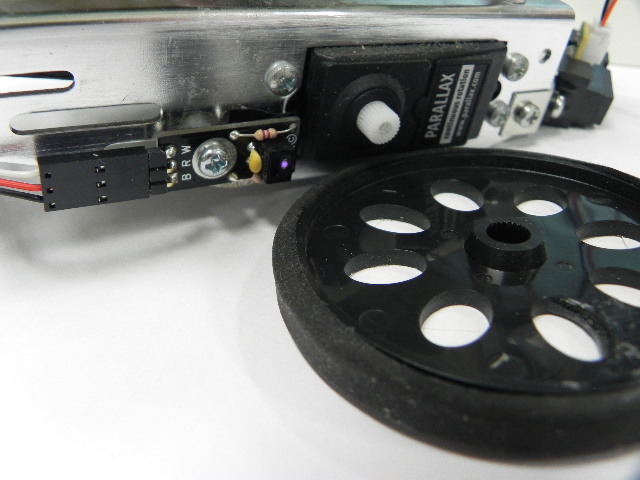
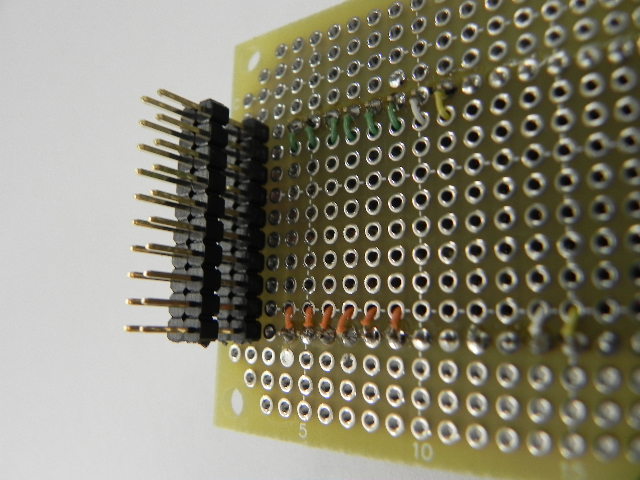
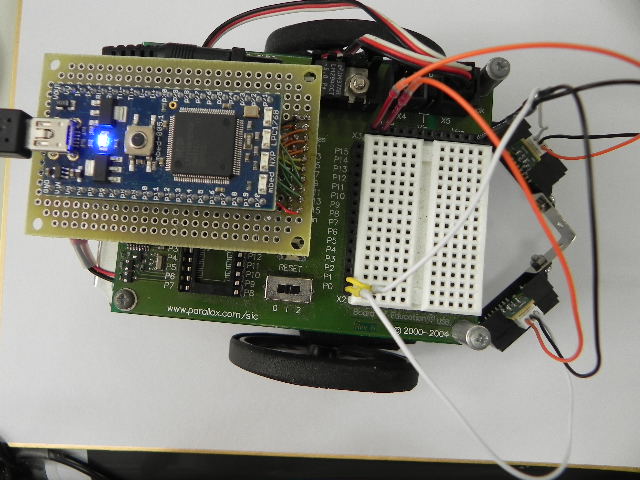
| 距離センサーを付ける | |
|---|---|
#include "mbed.h"
#include "IrDistance.h"
#include "BoeBot.h"
// Left, Right
IrDistance distance((PinName)P1,(PinName)P0);
Serial pc(USBTX, USBRX); // tx, rx
int main() {
pc.baud(115200);
while(true) {
pc.printf("Left:%6.2f ", distance.getLeft()*1000);
pc.printf("Right:%6.2f\n",distance.getRight()*1000);
wait(0.3);
}
}
|
1 2 3 4 5 6 PinNameにキャストする 7 8 センサーが正しく動作しているかチェックする。 9 10 11 12 距離に関係する数字を表示させる。 13 14 15 16 |