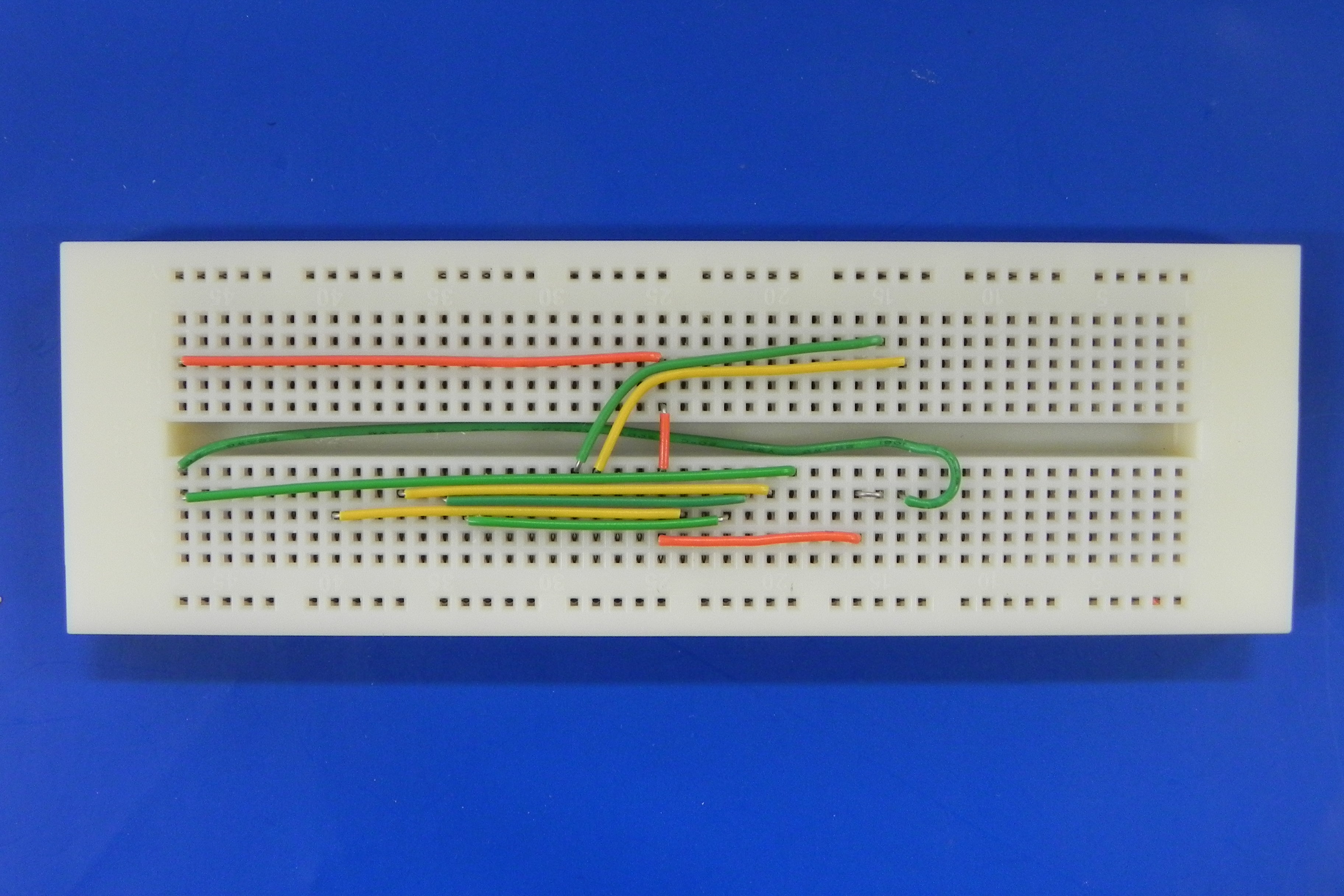
 配線 |
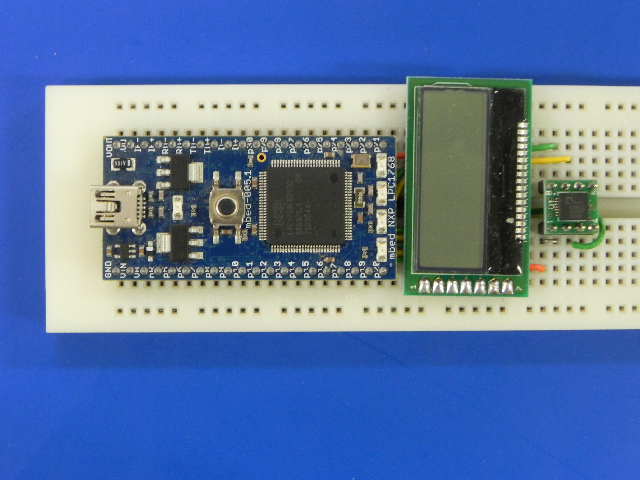 デバイスを乗せたところ |
| AQM1248A.h | |
|---|---|
#include "mbed.h"
#ifndef _AQM1248A_
#define _AQM1248A_
#define SPI_FREQ 1000000 // 1MHz
#define SPI_MODE 0
#define SPI_NBIT 8
class AQM1248A : public SPI
{
public:
AQM1248A(PinName mosi, PinName miso, PinName sclk, PinName cs, PinName rs);
void init();
void writeData(int data);
void writeCommand(int cmd);
void diplayOn(bool onoff);
void startLineSet(int address);
void pageAddressSet(int address);
void colAddressSet(int address);
void clear();
private:
DigitalOut *_rs;
DigitalOut _cs;
};
#endif
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 |