シリアルポートを選び、Silicon Labs~というのを選び、OKをクリックします。
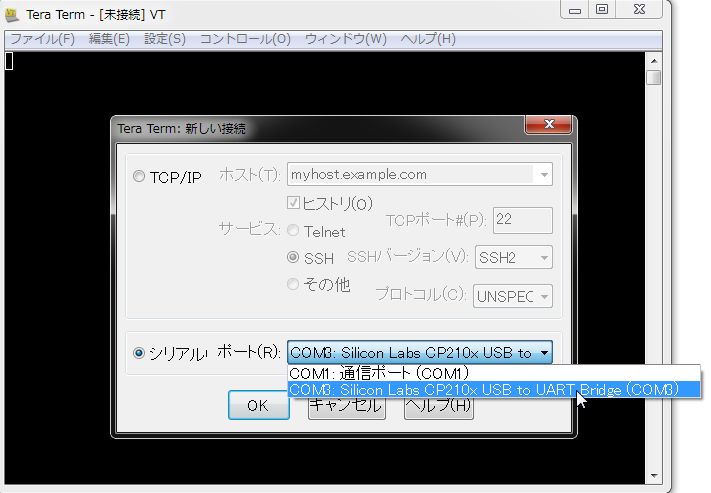
正しい判断が重要です。
特に、何も表示されないとかは危険です。
| A/Dコンバーターの値を読む | |
|---|---|
// teratermを接続断にしておく
// プログラム転送
// CPUボードスイッチオフ
// CPUボードスイッチオン
// teraterm 新しい接続
/*インクルード***********************************************************/
#include "vs-wrc003.h"
void startInit(char* str)
{
const BYTE MainCycle = 100;
Init((BYTE)MainCycle); //CPUの初期設定
InitSci3(CBR_9600,non,1); // シリアル転送設定(printf)
Mtr_Run(0, 0, 0, 0); // これをやらないと色々と動かない。モーター停止
while(!getSW()); // スイッチが押されるまで待つ
printf(str);
}
void main(void)
{
int left, right;
startInit("A/D converter Check");
LED(1); // LED緑を点け、オレンジは消す
while(1){
left = AdRead(0);
right = AdRead(1);
printf("left=%d right=%d\n", left, right);
}
}
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 ADの0番目のデータを読む 28 ADの1番目のデータを読む 29 結果をteratermに表示させる。 30 31 |