8個までのアドレス設定ができるので、複数利用するには便利です。
また、簡単な計算で摂氏の温度を得ることができます。
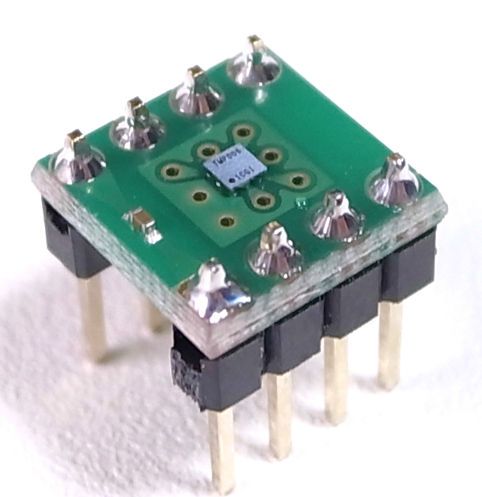
ピン配置は下図のようになります。

ここではADR0,ADR1はグラウンドに接続して用いています。

|
|
これはStrawberry Linuxで販売している温度センサーです。 8個までのアドレス設定ができるので、複数利用するには便利です。 また、簡単な計算で摂氏の温度を得ることができます。 ピン配置は下図のようになります。 |
|
|
|
|
|
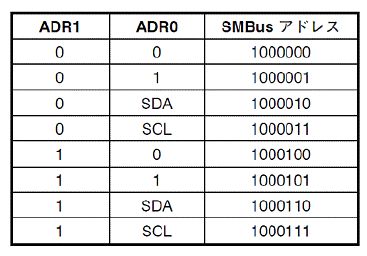
I2Cアドレスの設定は左図のようになります。 ここではADR0,ADR1はグラウンドに接続して用いています。 |
| TMP006.cs | |
|---|---|
using System;
using System.Threading;
using Microsoft.SPOT;
using Microsoft.SPOT.Hardware;
namespace BoeBotLib
{
public class TMP006
{
const byte TMP006_ADDRESS = 0x40;
private I2CDevice.Configuration _slaveConfig;
private const int TransactionTimeout = 1000; //ms
private const byte ClockRateKHz = 100;
// プロパティ
public byte Address { get; set; }
// addressは0~7
public TMP006(byte address)
{
Address = (byte)(TMP006_ADDRESS+address);
_slaveConfig = new I2CDevice.Configuration(Address, ClockRateKHz);
}
public int Read(byte pointer)
{
// V/T dummy
I2CBus.GetInstance().WriteRegister(_slaveConfig, pointer, 0x00, TransactionTimeout);
// get MSB and LSB result
byte[] data = new byte[2];
I2CBus.GetInstance().Read(_slaveConfig, data, TransactionTimeout);
int temp = data[0] << 8 | data[1];
return temp;
}
public double ReadTemperature()
{
while (!DataRady()) ;
double temp = Read(1);
// 4 * 32
return temp / 128;
}
private bool DataRady()
{
int data = Read(2);
if ((data & 0x80)!=0) return true;
return false;
}
public bool ConversionRate(byte n)
{
int now = Read(2);
now &= 0xffff1ff;
now |= n << 9;
byte[] data = new byte[2];
// 値 rate
// 0: 1/4
// 1: 1/2
// 2: 1
// 3: 2
// 4: 4
data[0] = (byte)((now >> 8)&0xff);
data[1] = (byte)(now & 0xff);
return I2CBus.GetInstance().WriteRegister(_slaveConfig,2,data,TransactionTimeout);
}
}
}
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 |
| Program.cs |
|---|
using System;
using Microsoft.SPOT;
using System.Threading; // 追加
using Microsoft.SPOT.Hardware; // 追加、参照設定にも追加
using GHI.OSHW.Hardware; // 追加、参照設定にも追加
using System.IO.Ports;
using BoeBotLib;
namespace TMP006Test
{
public class Program
{
public static void Main()
{
TMP006 ondo = new TMP006(0);
ondo.ConversionRate(0); // 0.5秒ごとのサンプリング
while (true)
{
Debug.Print(Std.sprintf("%f",ondo.ReadTemperature()));
}
}
}
}
|