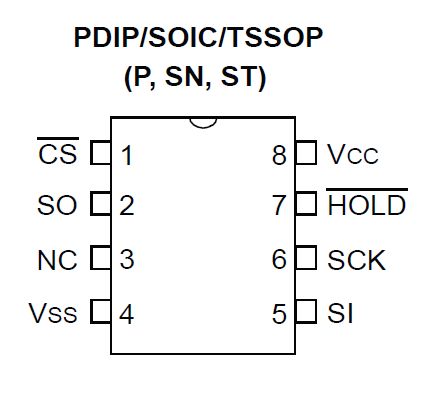
SI(5)はCPUのMOSIに接続します(P20, PB5)
SO(2)はCPUのMISOに接続します(P10, PB4)
SCK(6)はCPUのSCKに接続します(P12, PB3)
/HOLD(7)は特別なことをしないのでhighに接続します
/CS(1)は選択するためにCPUに接続します。(P16, PB8)

|
|
32kBのSRAMです。 SI(5)はCPUのMOSIに接続します(P20, PB5) SO(2)はCPUのMISOに接続します(P10, PB4) SCK(6)はCPUのSCKに接続します(P12, PB3) /HOLD(7)は特別なことをしないのでhighに接続します /CS(1)は選択するためにCPUに接続します。(P16, PB8) |
| Ser23K256.cs |
|---|
using System;
using System.Threading;
using Microsoft.SPOT;
using Microsoft.SPOT.Hardware;
using GHI.OSHW.Hardware;
namespace BoeBotLib
{
class SRAM
{
//hold pin 7 = high
const uint SRAM_SIZE = 32768;
enum Command
{
Read = 0x03,
Write = 0x02,
RDSR = 0x05,
WRSR = 0x01,
};
//hold is disabled
enum Mode
{
Byte = 0x01,
Page = 0x81,
Sequential = 0x41,
};
SPI _spi;
public SRAM(SPI _spi)
{
this._spi = _spi;
SetMode(Mode.Sequential);
CheckStatus();
}
//quick check using a couple read/writes
private void CheckStatus()
{
WriteByte(0, 100);
WriteByte(SRAM_SIZE - 1, 100);
WriteByte(0, 128);
WriteByte(SRAM_SIZE - 1, 192);
byte b1 = ReadByte(0);
byte b2 = ReadByte(SRAM_SIZE - 1);
if (b1 == 128 && b2 == 192)
{
Debug.Print("SRAM Found");
}
else
{
for (int i = 0; i < 50; i++)
{
Debug.Print("SRAM Error");
Thread.Sleep(100);
}
}
}
private void SetMode(Mode val)
{
byte[] output = new byte[2];
output[0] = (byte)Command.WRSR;
output[1] = (byte)val;
_spi.Write(output);
}
public byte WriteByte(uint addr, byte val)
{
if (addr > SRAM_SIZE)
{
return 0xFF;
}
byte[] output = new byte[4];
output[0] = (byte)Command.Write;
output[1] = (byte)(addr >> 8);
output[2] = (byte)(addr & 0xFF);
output[3] = val;
_spi.Write(output);
return 0;
}
public byte ReadByte(uint addr)
{
if (addr > SRAM_SIZE)
{
return 0xFF;
}
byte[] output = new byte[3];
byte[] input = new byte[1];
output[0] = (byte)Command.Read;
output[1] = (byte)(addr >> 8);
output[2] = (byte)(addr & 0xFF);
_spi.WriteRead(output, 0, 3, input, 0, 1, 3);
return input[0];
}
public byte WriteBuffer(uint addr, byte[] buffer)
{
if (addr + buffer.Length >= SRAM_SIZE)
{
return 0xFF;
}
else
{
byte[] output = new byte[3 + buffer.Length];
output[0] = (byte)Command.Write;
output[1] = (byte)(addr >> 8);
output[2] = (byte)(addr & 0xFF);
Array.Copy(buffer, 0, output, 3, buffer.Length);
_spi.Write(output);
return 0;
}
}
public byte[] ReadBuffer(uint addr, int count)
{
if (addr + count >= SRAM_SIZE)
{
count = (int)(SRAM_SIZE - addr);
}
byte[] output = new byte[3];
byte[] input = new byte[count];
output[0] = (byte)Command.Read;
output[1] = (byte)(addr >> 8);
output[2] = (byte)(addr & 0xFF);
_spi.WriteRead(output, 0, 3, input, 0, count, 3);
return input;
}
}
}
|
| main.cs |
|---|
using System;
using System.Threading;
using Microsoft.SPOT;
using Microsoft.SPOT.Hardware;
using GHI.OSHW.Hardware;
using BoeBotLib;
namespace SPI23K256test
{
public partial class Program
{
static SPI _spi = new SPI(new SPI.Configuration((Cpu.Pin)GHI.OSHW.Hardware.FEZCerberus.Pin.PB8, false, 0, 0, false, true, 5000, SPI.SPI_module.SPI1));
static SRAM sram = new SRAM(_spi);
static long time;
static long timeLast;
const int BufferSize = 1024;
public static void Main()
{
byte[] buffer = new byte[BufferSize];
int n = 32768 / BufferSize;
byte[] readBuffer = new byte[n];
int j = 0;
while (true)
{
for (uint i = 0; i < BufferSize; i++)
{
buffer[i] = (byte)((i+j) & 0xFF);
}
time = DateTime.Now.Ticks;
for (uint i = 0; i < 32768; i += BufferSize)
{
sram.WriteBuffer(i, buffer);
}
timeLast = (DateTime.Now.Ticks - time) / 10000L;
Debug.Print("WriteTime=" + timeLast);
time = DateTime.Now.Ticks;
int k=0;
for (uint i = 0; i < 32768; i += BufferSize)
{
buffer = sram.ReadBuffer(i, BufferSize);
readBuffer[k] = buffer[k];
k++;
}
timeLast = (DateTime.Now.Ticks - time) / 10000L;
Debug.Print("ReadTime=" + timeLast);
for (uint i = 0; i < n; i++)
{
Debug.Print("Addr=" + i + ", " + readBuffer[i]);
Thread.Sleep(100);
}
j++;
}
}
}
}
|
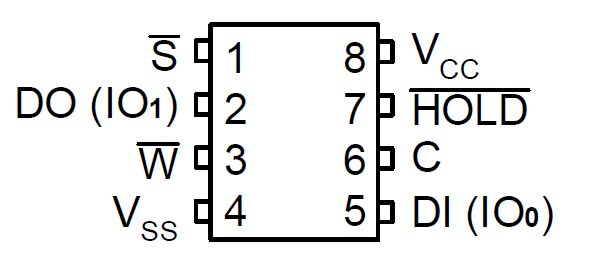 |
4MBのflashメモリです。 DI(5)はCPUのMOSIに接続します DO(2)はCPUのMISOに接続します C(6)はCPUのSCKに接続します /HOLD(7)は特別なことをしないのでhighに接続します /S(1)は選択するためにCPUに接続します。 /W(3)は読み書き信号のためにCPUに接続します。 |
| A25L032.h |
|---|
|
|
| A25L032.cpp |
|---|
|
|