
 ここでは、parallaxで販売しているHMC5883Lという方位センサーを使ってみます。このデバイスはI2CプロトコルのデバイスですのでI2CのLCDに表示させるのコントロールなどを先に理解してください。
ここでは、parallaxで販売しているHMC5883Lという方位センサーを使ってみます。このデバイスはI2CプロトコルのデバイスですのでI2CのLCDに表示させるのコントロールなどを先に理解してください。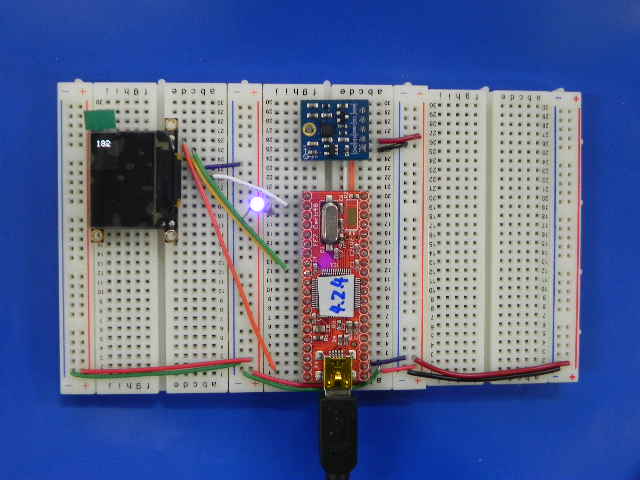
| I2C.cs |
|---|
using System;
using System.Threading;
using Microsoft.SPOT;
using Microsoft.SPOT.Hardware;
using GHI.OSHW.Hardware; // FEZCerberus使用のため追加、参照設定にも追加
using BoeBotLib;
namespace BoeBotLib
{
class I2C
{
// Set Constants for Address and Clock Frequency
byte address; // set to 7-bit address
const int CLOCK_FREQ = 100;
const int TIMEOUT = 1000;
public I2CDevice i2c;
// fez_cerb40はI2Cが一つしかないからピン設定は無い
public I2C(byte Address7)
{
address = Address7;
//Init I2C Device Config
I2CDevice.Configuration config =
new I2CDevice.Configuration(address, CLOCK_FREQ);
i2c = new I2CDevice(config);
}
public void Write(byte control, byte data)
{
i2c.Execute(new I2CDevice.I2CTransaction[1] {
I2CDevice.CreateWriteTransaction(new Byte[] { control, data }) }, TIMEOUT);
}
public int Read(byte Address)
{
byte[] Data = new byte[2];
i2c.Execute(new I2CDevice.I2CTransaction[1] { I2CDevice.CreateWriteTransaction(new Byte[] { Address }) }, TIMEOUT);
i2c.Execute(new I2CDevice.I2CTransaction[1] { I2CDevice.CreateReadTransaction(Data) }, TIMEOUT);
return Data[0] << 8 + Data[1];
}
public void Read(byte Address, byte[] Data)
{
i2c.Execute(new I2CDevice.I2CTransaction[1] { I2CDevice.CreateWriteTransaction(new Byte[] { Address }) }, TIMEOUT);
i2c.Execute(new I2CDevice.I2CTransaction[1] { I2CDevice.CreateReadTransaction(Data) }, TIMEOUT);
}
}
}
|
| HMC5883L.cs | |
|---|---|
using System;
using System.Threading;
using Microsoft.SPOT;
using Microsoft.SPOT.Hardware;
using GHI.OSHW.Hardware; // FEZCerberus使用のため追加、参照設定にも追加
using BoeBotLib;
namespace BoeBotLib
{
class HMC5883L : I2C
{
const byte HMC5883L_ADDRESS = 0x1E;
public HMC5883L()
: base(HMC5883L_ADDRESS)
{
Write(0,0x70); // 8-average,15Hz default, normal measurement mode
Write(1,0xa0); // Gain=5
}
public void readData(short[] data)
{
Write(2,1); // 計測開始
CPU.delay(6); // 終了を待つ
byte[] Data = new byte[6];
Read(3, Data); // X MSB から読み出し開始
byte high, low;
for(int i=0; i<3; i++) {
high = Data[i*2];
low = Data[i*2+1];
data[i] = (short)(((high) << 8) | low);
}
}
// 北を0度として反時計回りに角度を求める
public int readData()
{
short[] raw = new short[3];
readData(raw);
int x = raw[2];
int y = raw[0];
double dir=-1;
if(x>y && x!=0) dir = System.Math.Atan((double)y/x);
else if (y != 0) dir = System.Math.Atan((double)x / y);
double degree=dir*180/System.Math.PI;
if(x>=0)
{
if(y>=0){
if(x>y) dir = degree;
else dir = 90-degree;
}
else dir = 360+degree;
}
else
{
if(y<0)
{
if(x>y) dir = 180+degree;
else dir = 270-degree;
}
else dir = 90-degree;
}
return (int)dir;
}
}
}
|
1 2 3 4 5 6 7 8 9 10 I2Cクラスから派生される 11 12 7bitアドレスを指定する 13 コンストラクタ 14 15 16 初期化 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 0~359度に変換する 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 |
| main.cs |
|---|
using System;
using Microsoft.SPOT;
using System.Threading; // 追加
using Microsoft.SPOT.Hardware; // 追加、参照設定にも追加
using GHI.OSHW.Hardware; // 追加、参照設定にも追加
using System.IO.Ports;
using BoeBotLib;
// com1--p36
// com2--p28
// com3--p32
namespace AzimusMotion
{
public class Program
{
static DigitalOut LED = new DigitalOut(FEZCerberus.Pin.PC1, false);
public static void Main()
{
uOLED96G1 LCD = new uOLED96G1(); // LCDオブジェクトCOM2を用いる
HMC5883L compass = new HMC5883L(); // 方位センサーオブジェクト
LCD.EraseScreen();
while (true)
{
int degree = compass.readData(); // 測定する
LED.Write(true);
LCD.EraseScreen();
LCD.Print(0,0,""+degree,Color.White); // 左上に表示させる
CPU.delay(200);
LED.Write(false);
CPU.delay(200);
}
}
}
}
|