using System;
using System.Threading;
using Microsoft.SPOT;
using Microsoft.SPOT.Hardware;
using GHI.OSHW.Hardware;
using GHI.Hardware.FEZCerb;
using BoeBotLib;
using Pin = GHI.Hardware.FEZCerb.Pin;
class ADXL345_I2C
{
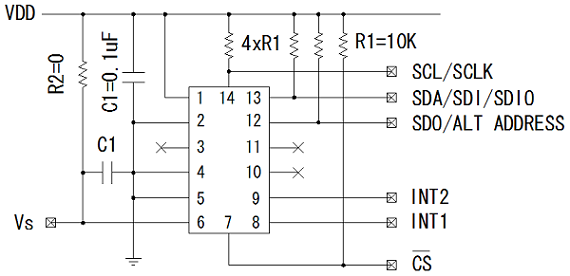
// 3軸加速度センサモジュール ADXL345(SPI/IIC)
// http://akizukidenshi.com/catalog/g/gM-06724/
//SDA signal to pin18, SCL signal to pin19
//With Vs=Vdd
// -> I2C address = 0x1D
ushort I2C_ADR;
int CLOCK_SPEED;
I2CDevice i2c;
public ADXL345_I2C() : this(400) { }
public ADXL345_I2C(int ClockSpeed)
{
I2C_ADR = 0x1D;
CLOCK_SPEED = ClockSpeed;
//create I2C object
I2CDevice.Configuration config = new I2CDevice.Configuration(I2C_ADR, CLOCK_SPEED);
i2c = new I2CDevice(config);
Measure();
}
public void Measure()
{
WriteReg(0x2D, 0x08);
}
public void Read(out double x, out double y, out double z)
{
//read from device
I2CDevice.I2CTransaction[] xActions;
byte regAddress = 0x32; //first axis-acceleration-data register on the ADXL345
//read the acceleration data from the ADXL345
byte[] readBuf = new byte[6];//buffer for reading 6 bytes
xActions = new I2CDevice.I2CTransaction[2];
xActions[0] = I2CDevice.CreateWriteTransaction(new byte[1] { regAddress });
xActions[1] = I2CDevice.CreateReadTransaction(readBuf);
int n = 0;
if ((n=i2c.Execute(xActions, 1000)) == 0)
throw new Exception("Failed to communicate on I2C");
ushort tmp = readBuf[1]; tmp <<= 8; tmp |= readBuf[0];
x = (short)tmp / 256.0;
tmp = readBuf[3]; tmp <<= 8; tmp |= readBuf[2];
y = (short)tmp / 256.0;
tmp = readBuf[5]; tmp <<= 8; tmp |= readBuf[4];
z = (short)tmp / 256.0;
}
public byte ReadDeviceID()
{
return ReadReg(0);
}
public void SelfTest(bool sw)
{
WriteReg(0x31, (byte)(sw ? 0x80 : 0));
}
public void WriteReg(byte regAddress, byte data)
{
I2CDevice.I2CTransaction[] xActions;
xActions = new I2CDevice.I2CTransaction[1];
xActions[0] = I2CDevice.CreateWriteTransaction(new byte[2] { regAddress, data });
if ((i2c.Execute(xActions, 1000)) == 0)
throw new Exception("Failed to communicate on I2C");
}
public byte ReadReg(byte reg)
{
I2CDevice.I2CTransaction[] xActions;
byte[] readBuf = new byte[1];
xActions = new I2CDevice.I2CTransaction[2];
xActions[0] = I2CDevice.CreateWriteTransaction(new byte[1] { reg });
xActions[1] = I2CDevice.CreateReadTransaction(readBuf);
if ((i2c.Execute(xActions, 1000)) == 0)
throw new Exception("Failed to communicate on I2C");
return readBuf[0];
}
}
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
|