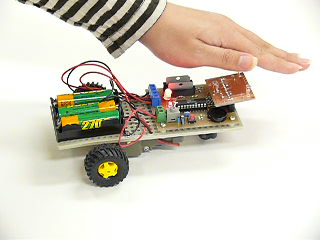
ここでは、モーターを動かします。
以下のプログラムをコピーして、貼り付けて使用してください。
| 「PWM」プログラム |
|---|
// ファイル名 PWM.c
// 16ms周期のPWM波形を作り、赤のLEDの明るさをコントロールする
#include <htc.h>
__CONFIG(PWRTEN&HS&WDTDIS&UNPROTECT&MCLRDIS&BORDIS&IESODIS&FCMDIS);
#define _XTAL_FREQ 20000000
#define PERIOD 100
/*
20MHz/4 = 5MHz
TMR0 * prescale*counter/5MHZ
= (256-PERIOD) * 256*2/5MHZ
= (256-100) * 256*2/5MHZ = 16m秒
*/
unsigned char counter=0;
void interrupt Intr(void)
{
// 割り込みがtimer0から来る
counter++;
TMR0 = PERIOD;
T0IF = 0; // 割り込みフラグクリア
return;
}
main()
{
unsigned int i, j;
PORTA = 0; // PORTAを0にする
TRISA = 0; // PORTAを出力に設定する
ANSEL = 0; // アナログ入力をOFF
// Timer0 の設定
OPTION = 0xd0; // FOSC/4 プリスケーラ1/2
T0IE=1; // Timer0 の割り込みON
T0IF=0; // 割り込みフラグクリア
GIE=1; // CPUへの割り込みON
while(1) {
for(i=0; i<255; i++) {
for(j=0; j<100; j++) {
if(counter <= i) RA0 = 1;
else RA0 = 0;
}
}
for(i=255; i>0; i--) {
for(j=0; j<100; j++) {
if(counter <= i) RA0 = 1;
else RA0 = 0;
}
}
}
}
|
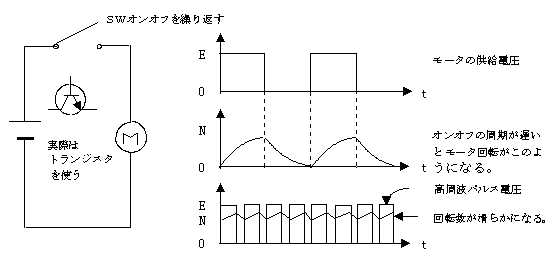
if(counter <= i) RA0 = 1; else RA0 = 0; | 1周期(16ms)を256分割して、0から255の時間に分けます。例えば190よりも小さいときに1、 それ以外の場合には0とすれば下図のようになります。(下図の場合発振器の都合で周期が約17msになっています。1目盛が5msです) |
|
|
#define SLOW 35 #define LOW 40 #define MIDDLE 80 #define MIDDLE2 120 #define HIGH 160
以下のプログラムをコピーして、貼り付けてください。
| 「CdSPWM」プログラム |
|---|
// ファイル名 CdSPWM.c
// CdSに手をかざすとそれに対応してモーターが動く
// 左前のCdSだけに手をかざすと押される感じに車体が右に旋回する(赤のLED点灯)
// 右前のCdSだけに手をかざすと押される感じに車体が左に旋回する(緑のLED点灯)
// 後ろのCdS場合はバックする(青のLED点灯)
// 全部かざすと前進する。(白のLED点灯)
// これをタイマー0割り込みを用いて実現する
// 関数にして機能分担化させる
// 自動閾値設定(初期値95%)を電源投入直後に行うのでCdSの上には障害物
// (手など)はあってはいけない。
#include <htc.h>
__CONFIG(PWRTEN&HS&WDTDIS&UNPROTECT&MCLRDIS&BORDIS&IESODIS&FCMDIS);
// マクロ宣言
#define true 1
#define false 0
#define _XTAL_FREQ 20000000
#define ANS4 0x10
#define ANS5 0x20
#define ANS6 0x40
#define AN4 0x11
#define AN5 0x15
#define AN6 0x19
#define PERIOD 100
/*********************************************/
/* モーターをPWMで動かす時に利用するグローバル変数の
counter変数のupdate間隔の計算
20MHz/4 = 5MHz
TMR0 * prescale*counter/5MHZ
= (256-PERIOD) * 2*256/5MHZ
= (256-100) * 2*256/5MHZ = 16m秒
*/
//***************************
#define SLOW 35
#define LOW 40
#define MIDDLE 80
#define MIDDLE2 120
#define HIGH 160
//**************************
typedef unsigned char byte;
// プロトタイプ宣言
void initialize();
byte checkCdS();
void setThreshold(byte th);
void overHand();
//******************
// グローバル変数の宣言
byte counter=0;
byte LeftCdS, CenterCdS, RightCdS;
byte ADch=0;
byte ConvEndFlag;
byte ADC[3]={AN4,AN5,AN6};
byte threshold[4];
//************************
byte Leftspeed=208;
byte Centerspeed=208;
byte Rightspeed=208;
//************************
// 割り込み処理ルーチン
void interrupt Intr(void)
{
// (256-PERIOD)*256/5MHz
// =(256-100)*2/5MHz = 62.4μs
// 62.4μs毎に割り込む
if(T0IF) { // 割り込みがtimer0からか?
counter++;
TMR0 = PERIOD;
T0IF = 0; // 割り込みフラグクリア
return;
}
if(ADIF) { // 割り込みがADコンバーターからか?
if(ADch==0) LeftCdS = ADRESH;
else if(ADch==1) CenterCdS = ADRESH;
else if(ADch==2) RightCdS = ADRESH;
ConvEndFlag=true; // データの更新あり
ADIF = 0; // 割り込みフラグクリア
}
}
main()
{
initialize(); // 各種初期設定
// 永久ループ
while(true) {
overHand(); // CdSでモーターを動かす
//checkCdS();
}
}
void initialize()
{
PORTA = 0; // PORTAを0にする
TRISA = 0; // PORTAを出力に設定する
ANSEL = ANS4 | ANS5 | ANS6; // PORTAアナログ入力をAN4-6をON
ADCON0 = AN4; // ADFM=0(左詰) ADon
OPTION = 0; // FOSC/4 プリスケーラ1/2
// 20MHz/4/2 = 2.5MHz
PORTC = 0; // PORTCを0にする
TRISC = 0x0f; // PORTC下4bit入力、上4bit出力
ANSELH = 0; // PORTCアナログ入力をOFF
// Timer0 の設定
T0IE=1; // Timer0 の割り込みON
T0IF=0; // 割り込みフラグクリア
setThreshold(65);
// ADコンバーターの設定
ADIE = 1; // ADコンバータの割り込み許可
ADIF = 0; // 割り込みフラグクリア
PEIE = 1; // 周辺装置の割り込み許可
GIE = 1; // CPUへの割り込み許可
GODONE = 1; // AD変換スタート
}
byte checkCdS()
{
byte status;
if(ConvEndFlag) { // AD変換が終わったらすぐに次のチャンネルの変換を行う
ConvEndFlag = false;
if(++ADch==3) ADch=0;
ADCON0 = ADC[ADch]; // ADチャンネル変更
GODONE = 1; // AD変換スタート
}
PORTA=0;
if(RightCdS<threshold[2]) RA2=1; // 赤
if(CenterCdS<threshold[1]) RA1=1; // 緑
if(LeftCdS<threshold[0]) RA0=1; // 青
status = RightCdS<threshold[2];
status += (CenterCdS<threshold[1])?2:0;
status += (LeftCdS<threshold[0])?4:0;
return status;
}
void setThreshold(byte th) // 平均の指定%を閾値にする
{
byte i, j, x, g;
int average[3]={0,0,0};
g = GIE; // 割り込み状態の保存
GIE=0; // 割り込みは使わない
// 明るいときの値 明るいと大きい値
ADC[0]=AN4;
ADC[1]=AN5;
ADC[2]=AN6;
for(j=0; j<40; j++) { // 平均の明るさを求める
for(i=0; i<3; i++) {
ADCON0 = ADC[i];
GODONE = 1;
while(GODONE);
x = ADRESH;
average[i] = (average[i]*9+x)/10;
}
}
for(i=0; i<3; i++)
threshold[i]=average[i]*th/100;
GIE = g; // CPUへの割り込み状態を戻す
}
void overHand()
{
while(RA3) {
switch(checkCdS()) {
case 7: Rightspeed=Leftspeed=MIDDLE; // 直進
RC5 = RC7 = 0;
break;
case 6: Rightspeed = LOW; Leftspeed = MIDDLE;
RC5 = 0; RC7 = 0;
break;
case 4: Rightspeed = ~MIDDLE; Leftspeed = MIDDLE;
RC5 = 1; RC7 = 0;
break;
case 3: Rightspeed = MIDDLE; Leftspeed = LOW;
RC5 = 0; RC7 = 0;
break;
case 1: Rightspeed = MIDDLE; Leftspeed = ~MIDDLE;
RC5 = 0; RC7 = 1;
break;
case 2:
Rightspeed=Leftspeed=~MIDDLE;
RC5 = RC7 = 1;
break;
default:
case 0: Rightspeed=Leftspeed=255;
RC5 = RC7 = 1;
break;
}
RC4 = counter<Rightspeed;
RC6 = counter<Leftspeed;
}
}
|
byte checkCdS()
| ADコンバータの値、つまりCdSの手のかざし加減を見てどのCdSの上に手があるかを知らせます。 |
void overHand()
| 上記checkCdS()から知らされた値でモーターを指定通りに動かします。 |
RC4 = counter<Rightspeed; RC6 = counter<Leftspeed; |
ここで左右のモーターをPWM制御をしています。 counter<Rightspeedが正しかったらRC4に1、そうでなかったら0が代入されます。 |
Rightspeed = ~MIDDLE; RC5 = 1; | モーターを逆転させるには、RC5を1にしなければいけませんが、同時にRC4の波形を逆転させなければいけません。例えば正転で100の期間Highだった場合はLowは156になります(8bit, 全部で256だから)。この逆転と言うことは156Highにして100Lowにすることです。問題は156をどうやって高速に求めるかです。256-100でいいのですが、非力のCPUでは時間とメモリーを使ってしまいます。以下に簡単でメモリーを使わないでプログラムをするかが問題です。これは簡単で、100のbit反転すればいいだけです。誤差が1出ますが(155になる)モーターを動かすな使用法では全く問題はありません。~MIDDLEはMIDDLEのbit反転を意味します。 |