ステッピングモーターについて
どのようなものか
直流モーターでもなく、交流モーターでもなく、サーボモーターでもありません。パルスモーターとも呼ばれています。
動作原理については、オリエントモーターの説明が分かりやすいでしょう。
また、実際に利用する場合の基礎としては、こちらが分かりやすいと思います。
実際に使われているモーターは何かと調べてみると、
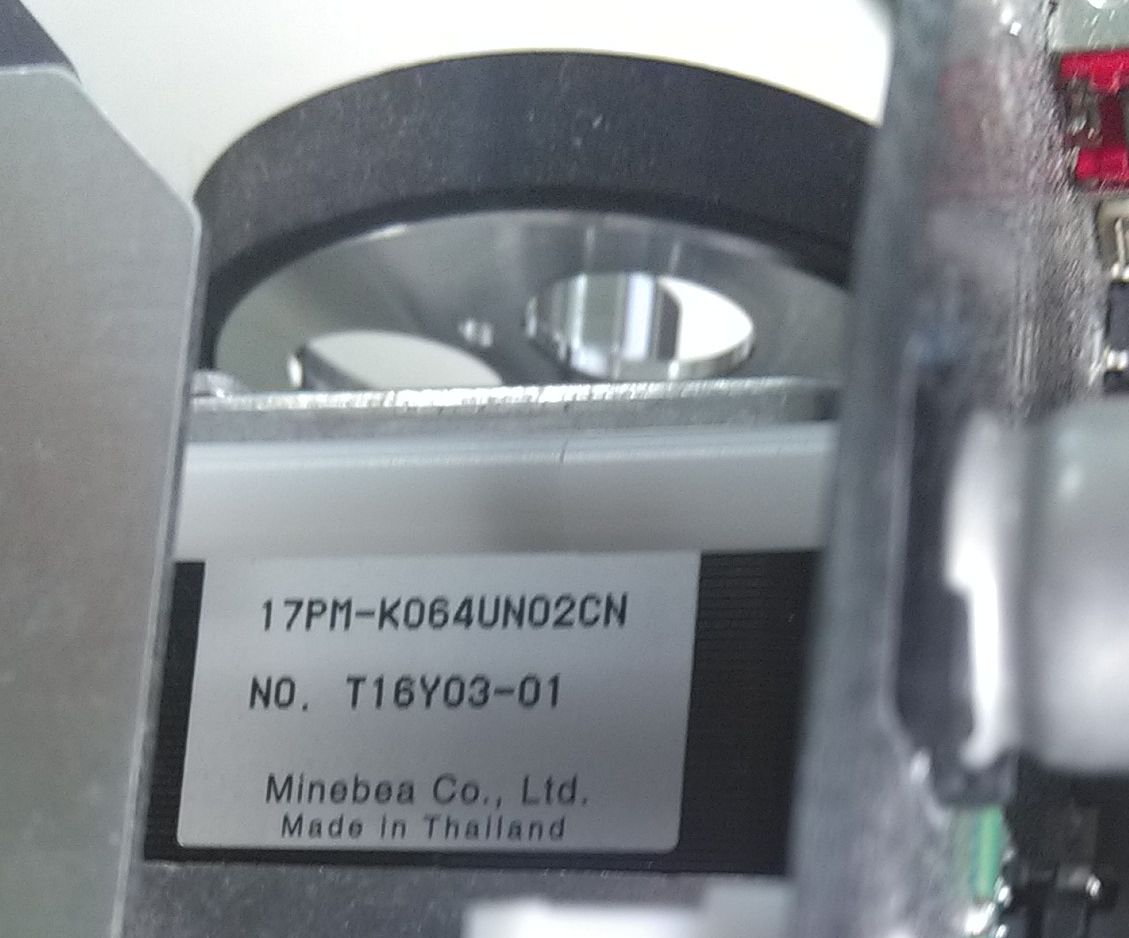
17PM-K064UN02CNという型名のモーターらしいことがわかります。作った会社はミネベアという会社で、タイで作られたことも分かります。ちなみに、教え子が多分この工場の工場長をしていたことを思い出しました。
このモーターの仕様はこれです。
このモーターを動かすには励磁シーケンスを作り出すドライバーが必要になります。
このモータードライバーの仕様はこれです。
あたりまえのことですが、モーターを動かすためにはモーターの特性、モータードライバーの動作、回路図が理解できていなければ正しく動くはずはありません。が、この回路は簡単にコンピュータから制御できるようになっています。
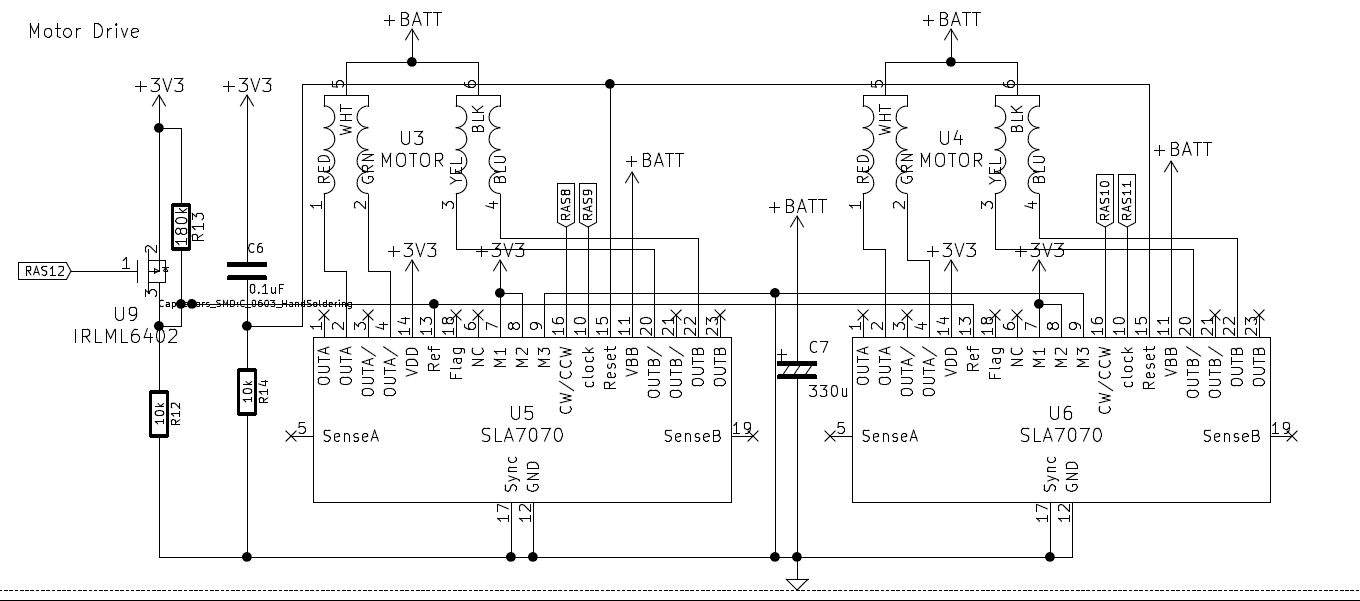
ラズパイマウスの回路図はこれです。
動かすにはどうするか
モーターの仕様の一部を脱ぎが期してみました。
| 型式 | ステ ッ プ 角 | ドラ イ ブ 方式 | 定格電流 | 巻線抵抗 |
|---|
| (d eg) | | (A ) | (O hms) |
| 17PM-K764U | 1.8 | UNI-POLAR | 0.6 | 5.6 |
ここで、重要な数字はステップ角で1.8度です。これは360/1.8=200となり、一周するには200パルス必要となることを意味します。
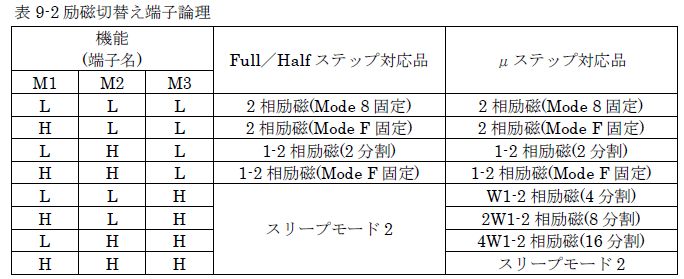
また、回路図とドライバーの仕様書を見比べてみると、回路図ではM1=M2=3.3V、M3=0Vとなっています。従って、ドライバーの仕様書の表9-2をみると1-2相励磁となっていることが分かります。冒頭の動作原理のところを理解していれば、1-2相励磁の場合、一周するには倍のパルスが必要になるので400パルスで一周することが分かります。
後は、cw/ccw [clock wise(時計回り)/counter clock wise(半時計回り)]の指定とclockをcpuから与えれば回るということになります。(当然電源を入れての話)
ドライバーとcpuとの接続を確認してみます。
| 動作 | 信号 |
|---|
| U5のドライバーのcw/ccw | RAS8 |
| U5のドライバーのclock | RAS9 |
| U6のドライバーのcw/ccw | RAS10 |
| U6のドライバーのclock | RAS11 |
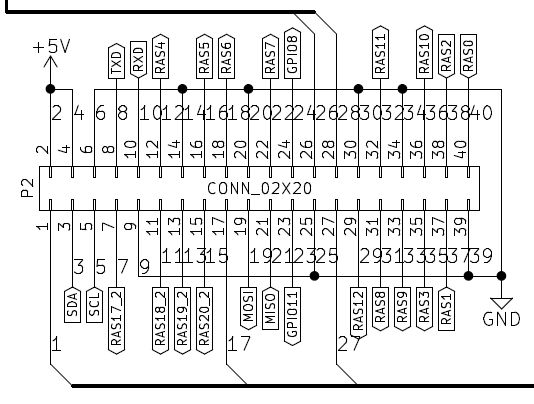
このRAS8からRAS11はどこに繋がっているかと回路図を見るとP2コネクタに接続されていることが分かります。
| 信号 | ピン |
|---|
| RAS8 | 31 |
| RAS9 | 33 |
| RAS10 | 36 |
| RAS11 | 32 |
上記二つの表を繋げると下記のようになります
| 動作 | 信号 | ピン |
|---|
| U5のドライバーのcw/ccw | RAS8 | 31 |
| U5のドライバーのclock | RAS9 | 33 |
| U6のドライバーのcw/ccw | RAS10 | 36 |
| U6のドライバーのclock | RAS11 | 32 |
そこで、以下のラズパイマウスのコネクタのピンと信号の表を見ると 、U5は右の車輪を動かすモーターで、U6は左の車輪を動かすモーターであることが分かりました。
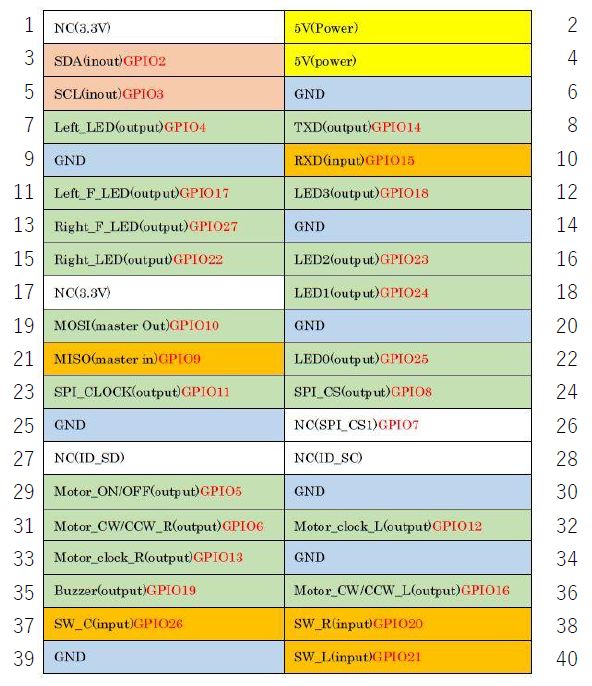
以上で、CPUからの信号がP2コネクタ→U5,U6モータードライバー→ステッピングモーターの順番で流れてモーターが動くことが分かったと思います。