マイクロコントローラーによるロボットの製作
ロボットは自動車産業、医療、生産業、SF映画など広い範囲で使われています。最近では、爆弾などの危険物処理、爆発などの危険が伴う場合の消火ロボット、ロボットのペット、芝刈り機や掃除をしてくれるロボットなど、私達の身近にもたくさん現れてきました。ロボットの基本は、どのようなことが起こったら、どのように動かすか。つまり極論を言えば、センサーの状態を読み取ってモーターを動かすことです。この講座では上記のような高度なロボットを作るのではなく、基本的なセンサー(光、音)の読み取りとモーターを動かすプログラムの作り方を学びます。
このようなロボットを作製するには、簡単な電子工作とプログラミング知識等の知識を必要としますが、全く知らなくても動かして楽しめます。初めての方でも基礎から学ぶことができますので、ぜひロボット製作に挑戦してみてください。 なお、今回の講座で製作したロボットは各自で持ち帰っていただくことができます。
以下のようなロボットの組み立てとプログラミングを行います。
センサーのアタッチメントを変えることによって3つの動作をさせることができます。
PICを用いてセンサーとモーターをコントロールします。以下の内容を予定しています(順番も変わる可能性もあります)。時間の関係上全部できない場合があります。
車体を作る。
電子回路基板の半田付け。
カラーLEDを光らせてみよう。
音を出してみよう。
A/Dコンバーターを使ってみよう。
割り込みのプログラムを作ってみよう。
PWMでモーターを動かしてみよう。
CdSで光を感じてみよう。
マイクで音を感じてみよう。
アタッチメントの自動判別をしてみよう。
ライントレースをしてみよう。
なお、PICの書き込み器には数に限りがありますので、2人一組となる場合があります。
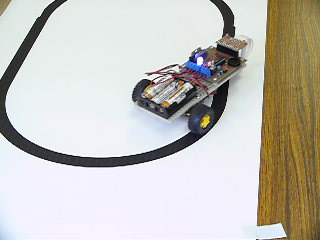
ライントレース動作
簡単な、楕円のラインをトレースします。赤外線を出して、その反射光の有無を4つのセンサーで受け、どのようにずれているかを検出し、それに応じて左右のモーターをコントロールします。さらに複雑なラインに対してトレースするにはセンサーの位置、プログラムの変更が必要になります。
Video not playing?
Download file
instead.
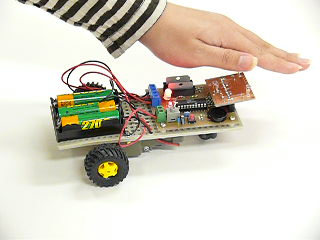
光の加減で動かす
CdSセル(フォトレジスター)を3つ用いています。このCdSセルは、このセルにあたる光の強さに応じて抵抗が変わる素子で、前方に2つ、後方に1つ付けてあります。全部を隠すと前進、後ろの1つを隠すと後進、左右の1つを隠すと逃げる方向に動きます。
Video not playing?
Download file
instead.
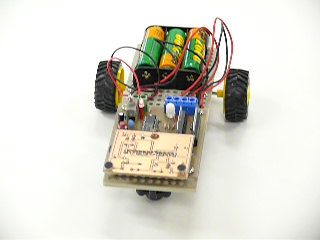
別の方向から
Video not playing?
Download file
instead.
音で動かす
小型マイクを3つ配置し、手を叩いた音がした方を向きます。データ取得スピードの問題で、たまに違う方向を向いてしまいます。
Video not playing?
Download file
instead.
基本的にこのページはIEで見ることができるようにしています。 ブラウザをMozilla Firefox、Safariを使っている人は
プラグイン
をインストールしてください。
企画: 水野 真
教材製作スタッフ: アツアンヤ亜伊子、平野絵美