


USBケーブルを用いる場合は5VはCN10の24ピンに出ている。
新しい光学マウスだと直接USB出力になっていたりするので、古めのマウスを用いる。
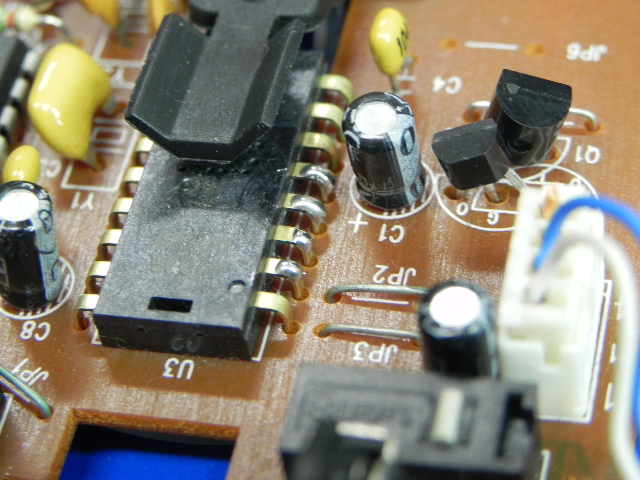
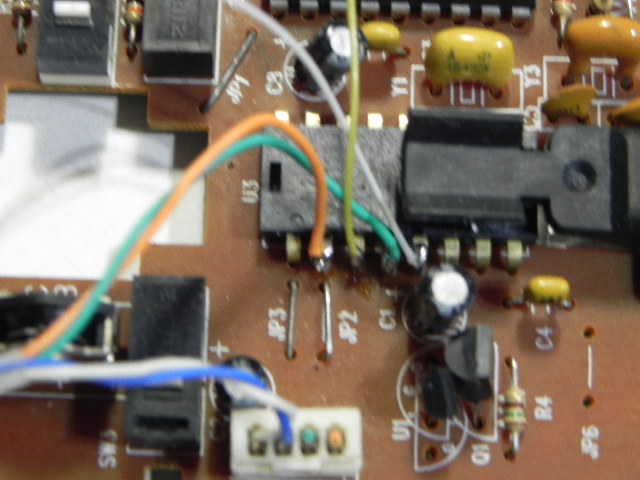
オシロスコープを用いてX方向の情報のピンとY方向の情報のピンを探した結果、写真の4つのピンであるらしいことが分かった。

|
|
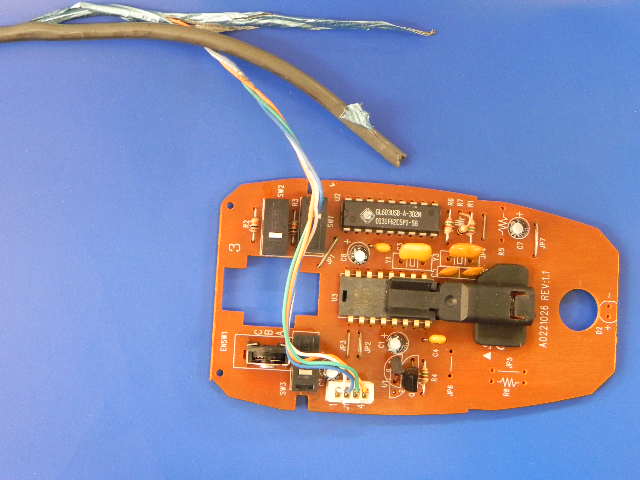
手元に古いこんなマウスがあった。 |
|
|
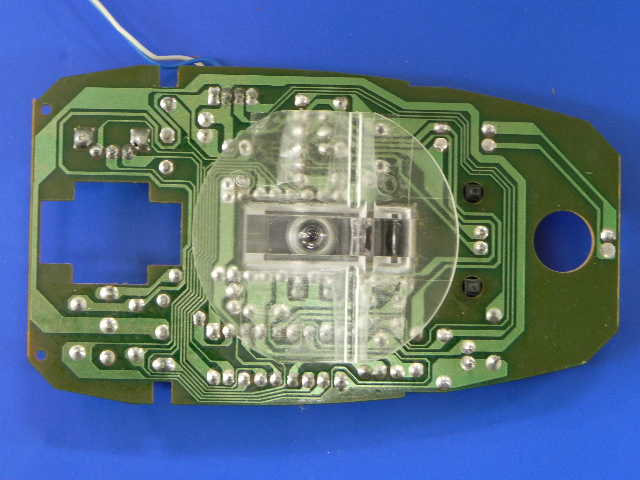
裏側はこんな感じ。 |
|
|
USBケーブルをカッターなどで中の線材を取り出す。 |
|
|
レンズ部分を接着させるために両面テープを両方につけておくと取れにくい。 |
|
|
接着後 |
|
|
ICの2,3,4,5番ピンに予備はんだをする。 |
|
|
力がかかって半田付け部分が取れにくくするために穴などに通しておくと安全。 |
|
|
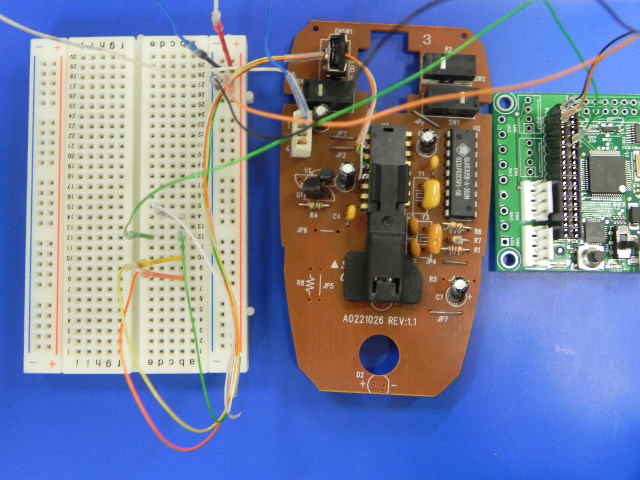
信号のチェック用にブレッドボードを用意してここまでが正しかったかをチェックする。 USBケーブルを用いる場合は5VはCN10の24ピンに出ている。 |
|
|
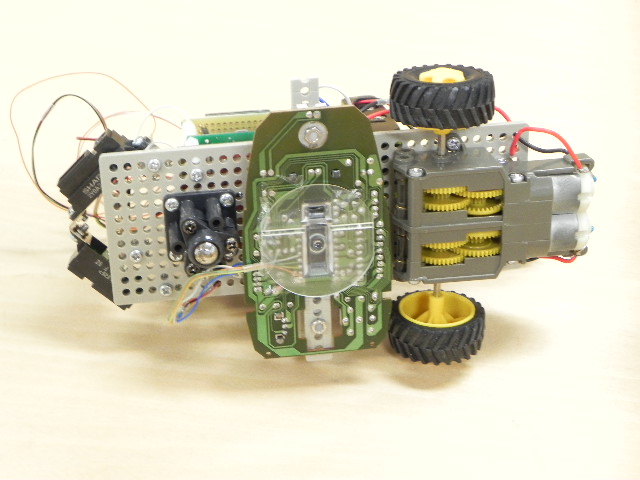
光学マウスを解体して、信号を取り出し、これを用いて走行距離を求める。 |
|
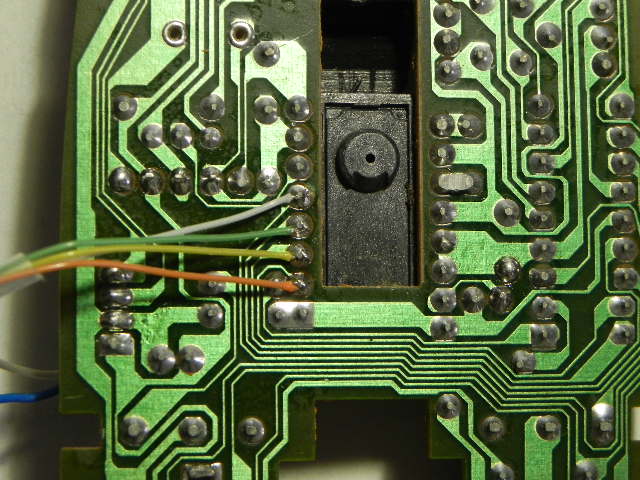
裏から信号を取る場合。 |
|
裏だと配線が邪魔になるので、表から信号を貰う方が安全である。 新しい光学マウスだと直接USB出力になっていたりするので、古めのマウスを用いる。 オシロスコープを用いてX方向の情報のピンとY方向の情報のピンを探した結果、写真の4つのピンであるらしいことが分かった。 |
| ICの信号について | |
|---|---|
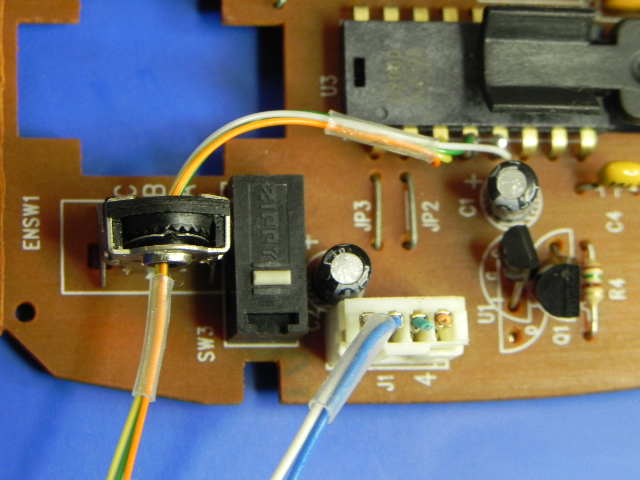
1番ピンがGND JP3 青(J1) 2番 X1 左X1が先 橙色 3番 X2 黄色 4番 Y1 緑色 5番 Y2 前進Y1が先 白色 J1 1 +Vdd(5V) 白色 2 GND 青色 |
CPUへの接続 橙色------P50(CN10-20) 割り込みWkp0 黄色------P74(CN10- 8) 方向読み取り用 緑色------P51(CN10-19) 割り込みWkp1 白色------P70(CN10- 5) 方向読み取り用 |
| main.c | |
|---|---|
#include "iodefine.h"
#include "vs-wrc003.h"
void main(void);
void startInit(char* str);
void main(void)
{
startInit("mouse encoder test\n");
IO.PCR5 &= ~2; // P51を入力に設定
while(1){
LED(IO.PDR5.BIT.B1);
}
}
void startInit(char* str)
{
const BYTE MainCycle = 60;
Init((BYTE)MainCycle); //CPUの初期設定
InitSci3(CBR_115200,non,1);
Mtr_Run(0,0,0,0);
LED(1); // 緑
while(!getSW() );
printf(str);
LED(0);
}
|
1 2 3 4 5 6 7 8 9 10 P51のビットのみ0にする。 11 12 P51の入力したデータをそのままLEDに送る。 13 緑のLEDが動きに応じてチカチカするはず。 14 15 16 17 18 19 20 21 |
| main.cpp | |
|---|---|
#include "common.h"
#include "primary.h"
void main(void);
BYTE getSW(); //スイッチ読み込み
void startInit(char* str);
void main(void)
{
startInit("mouse encoder test\n");
Port forward(CPU.port5, 1);
forward.setInput(); // P51を入力に設定
while(1){
LED(forward.readPin());
}
}
void startInit(char* str)
{
init();
LED(1); // 緑
while(!getSW() );
LED(0);
printf(str);
}
|
1 2 3 4 5 6 7 8 9 10 11 P51ポートのオブジェクトを作る 12 P51のビットを入力に設定する。 13 P51の入力したデータをそのままLEDに送る。 14 緑のLEDが動きに応じてチカチカするはず。 15 16 17 18 19 20 21 |
| 前進距離を測定する | |
|---|---|
void main(void)
{
startInit("mouse encoder test\n");
Port forward(CPU.port5, 1);
Port direction(CPU.port7, 0);
forward.setInput(); // P51を入力に設定
direction.setInput(); // P70を入力に設定
int distance=0, before=0;
while(1){
int choice=forward*2+direction;
switch(choice)
{
case 0: if(before==1) distance++;
else if(before==2) distance--;
before=0;
break;
case 1: if(before==3) distance++;
else if(before==0) distance--;
before=1;
break;
case 2: if(before==0) distance++;
else if(before==3) distance--;
before=2;
break;
case 3: if(before==2) distance++;
else if(before==1) distance--;
before=3;
break;
}
printf("%d\n",distance);
}
}
|
1 2 3 4 5 6 7 8 beforeは一つ前の状態 9 10 現在の状態を求める 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 距離の表示 31 32 |
| 前後左右の距離を求める main.cpp | |
|---|---|
void main(void)
{
startInit("mouse encoder test\n");
Port forward(CPU.port5, 1);
Port direction(CPU.port7, 0);
Port Right(CPU.port5, 0);
Port Left(CPU.port7, 4);
forward.setInput(); // P51を入力に設定
direction.setInput(); // P70を入力に設定
Right.setInput(); // P50を入力に設定
Left.setInput(); // P74を入力に設定
int distance=0, before=0;
int distance2=0, before2=0;
while(1){
switch(forward*2+direction)
{
case 0: if(before==1) distance++;
else if(before==2) distance--;
before=0;
break;
case 1: if(before==3) distance++;
else if(before==0) distance--;
before=1;
break;
case 2: if(before==0) distance++;
else if(before==3) distance--;
before=2;
break;
case 3: if(before==2) distance++;
else if(before==1) distance--;
before=3;
break;
}
switch(Left*2+Right)
{
case 0: if(before2==1) distance2++;
else if(before2==2) distance2--;
before2=0;
break;
case 1: if(before2==3) distance2++;
else if(before2==0) distance2--;
before2=1;
break;
case 2: if(before2==0) distance2++;
else if(before2==3) distance2--;
before2=2;
break;
case 3: if(before2==2) distance2++;
else if(before2==1) distance2--;
before2=3;
break;
}
printf("%d %d\n",distance,distance2);
}
}
|
1 上省略 2 3 4 ポート設定 5 6 7 8 9 10 11 12 13 前後方向 14 左右方向 15 16 前後方向 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 左右方向 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 |
| 設定の部分 | |
|---|---|
上省略
#include "interruptClass.h"
extern int wkCount, wkCount2, wkThermo, wkcnt[];
extern BYTE intKind;
void startInit(char* str);
BYTE getSW(); //スイッチ読み込み
void main()
{
startInit("\n*** wkp interrupt test ****\n");
interruptClass wkp;
wkp.setWkpInt(0, 1);
wkp.setWkpInt(1, 1);
Port X1 = Port(CPU.port7, 4);
Port Y1 = Port(CPU.port7, 0);
X1.setInput();
Y1.setInput();
I2CLCD display;
IrDistance robo;
wkp.enable();
wkCount=wkCount2=0;
int diffx, diffy,oldx=0,oldy=0;
char buff[15];
robo.setForward();
robo.setHighTime(robo.Ach, 0x4000); // 左
robo.setHighTime(robo.Bch, 0x4000); // 右
while(true)
{
diffx = oldx-wkCount;
diffy = oldy-wkCount2;
if(diffx != 0 || diffy !=0) {
display.home();
sprintf(buff,"%5d%5d", wkCount, wkCount2);
display.write(buff);
oldx = wkCount;
oldy = wkCount2;
}
if(getSW())
{
oldx = wkCount=0;
oldy = wkCount2=0;
}
CPU.delay(10000);
}
}
|
1 2 3 X及びY方向のカウンタなど 4 割り込みの種類 5 6 7 8 9 10 割り込みオブジェクト 11 bit0を立ち上がりで割り込むように設定 12 bit1を立ち上がりで割り込むように設定 13 もう一つのXの状態を読むオブジェクト 14 もう一つのYの状態を読むオブジェクト 15 入力に設定する 16 17 LCDディスプレイオブジェクト 18 距離センサオブジェクト 19 割り込み許可 20 カウンタの初期化 21 22 LCDディスプレー用バッファ 23 ロボットを前進させる設定 24 スピード設定 25 26 ここから全ての処理スタート 27 28 xの移動距離 29 yの移動距離 30 マウスがどちらかに移動したらば 31 LCDディスプレーをクリア 32 33 カウントを表示 34 カウントを記憶 35 36 37 CPU基板上のスイッチが押されたら 38 39 距離データをクリアする 40 41 |
| 重要 |
|---|
ヘッダファイルとライブラリのダウンロード |