乾電池を一個つなげれば、回転します。二個直列につなげれば高速回転します。三個直列につなげると、さらに高速回転しますが、変な臭いがし始めて壊れるかもしれません。

例えば半分のスピードにするために半分の電圧にすることを考えます。
電圧を下げるために抵抗を直列につなぐと考える人もいるでしょう。使用条件に依存しますが、0.5A流れるとして半分の電圧がモーターにかかるとすると、
2R = 1.5(V)/0.5(A) = 3、 従ってR=1.5Ω、抵抗で消費される電力 P=IV = 0.5*0.75=0.375、従って1.5Ωで1/2Wの抵抗が必要になります。
1/4のスピードにするには4R=3になり、R=0.75Ωとなります。
では、連続的にスピードを変えるにはどうするかというと、消費電力が大きく、抵抗値の小さい可変抵抗が必要になります。そんなの売っていません。さらにこれをコンピュータでコントロールするには? と考えるとだんだんと複雑になります。従って、ここでこの延長を考えるのをやめます。
モーターを乾電池1個つなぐ場合を考えます。
- 10秒間だけモーターに電流を流します。それなりに回ります。
- 次に5秒間だけモーターに電流を流し、後の5秒は流しません。それなりに回り、止まります。
- 1秒電流を流し、1秒電流を止めるを繰り返し、10秒間続ける。回ったり止まったりする。
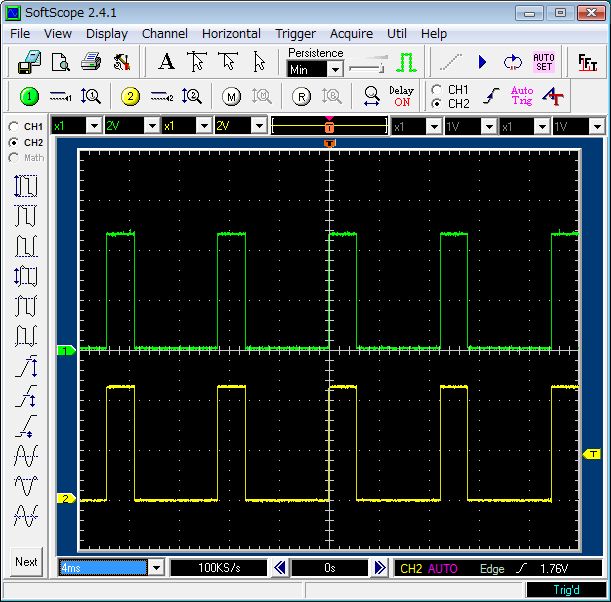
- 1/10秒電流を流し、1/10秒電流を止めるを繰り返し、10秒間続ける。動いたり止まったりする暇が無いので、以前より遅く回る。
- 30/100秒電流を流し、70/100秒電流を止めるを、繰り返すとさらに遅く回る。
- 10/100秒電流を流し、90/100秒電流を止めるを、繰り返すとさらに遅く回る。
- 0秒電流を流し、1秒電流を止めるを繰り返すとモーターは止まる。
実際には、逆回転ができないと意味が無いので、CPUボード内蔵のTB6552というICはこれができるHブリッジ回路を採用しています。しかし、パワーが足りないのでさらに外部にTA7291Pを用いてモーターを回します。