第十章 ロボットサッカーにチャレンジ

10-1 ボールを自作する
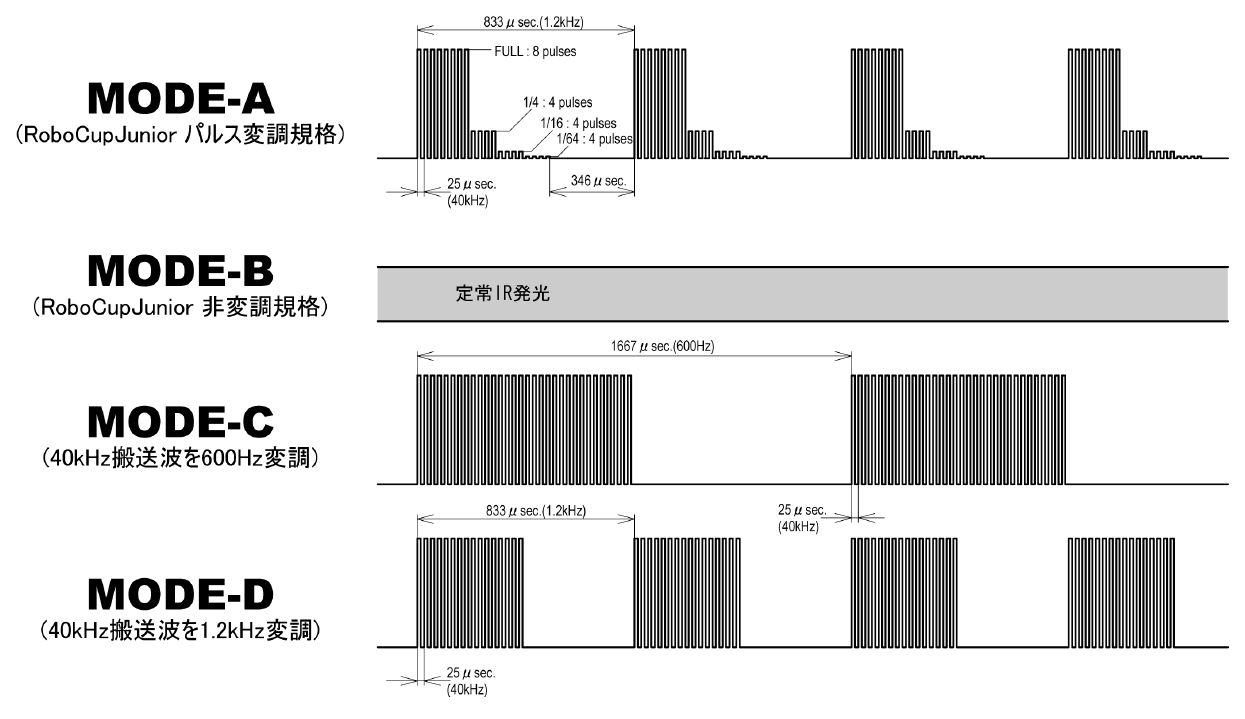
RoboCupJuniorのサッカーボールが発する赤外線は以下のような規格です。チェックのため、これと同じような赤外線を出す装置を作ってみましょう。これはとても簡単なのでPICを使ってみます。
ここではmikroCというPIC専用のコンパイラを用います。お金を払わなくてもちょっとした小さいプログラムならば(2Kワードサイズのプログラムまで無償利用可能)、快適に使えます。ここではV5.61を用いました。他のコンパイラでは多少ソースプログラムの変更が必要になりますが、原理が分かっていれば簡単なことでしょう。
難しいのはMODE-Aだけなので、これが出来れば全部できたことになります。
PICは手持ちのPIC16f690を用いましたが、他のものでも簡単にできるはずです。
MODE-Aは4つの振幅の異なる40kHzの赤外線を発します。近接していて全部の信号が受信モジュールで受信できた場合、信号の幅が広くなります。また、信号源と受光素子の距離が遠くなると受信モジュールで検出できなくなり、幅が狭くなります。遠くになればなるほど狭くなり、遠すぎると検出さえできなくなります。このようにMODE-Aの信号を利用するとロボットとボールとの距離をある程度知ることが出来ます。
まず、練習としてこの受信モジュールの出力の模擬プログラムを作ってみましょう。
- 10-1-1 受信モジュールの出力の模擬
- 10-1-2 赤外線ボールの信号を作る
10-2 信号を受信する
- 10-2-1 信号を受信しパルス幅を計測する
- 10-2-2 コマンド解析部分
- 10-2-3 メインCPUで受信する